Hoy quiero contarles como realicé una herramienta para calibrar el tercer espejo de una cortadora láser utilizando impresión 3D.
El problema
Todo comenzó cuando me di cuenta de que el tercer láser de la cortadora láser de tubo de CO2 estaba desalineado. Este desajuste provocaba cortes imprecisos.
Muchos puede que piensen que es un problema de la potencia del láser, y temporalmente puede ser la solución; sin embargo, el aumentar la potencia del láser innecesariamente propicia un desgaste más rápido. Por lo cual es necesario mantener todos los espejos alineados de forma optima para que la cortadora funcione de adecuadamente, por lo cual decidí diseñar una herramienta que me permite realizar el proceso de calibración del tercer espejo.
Paso 1: Medir el Diámetro del Tubo
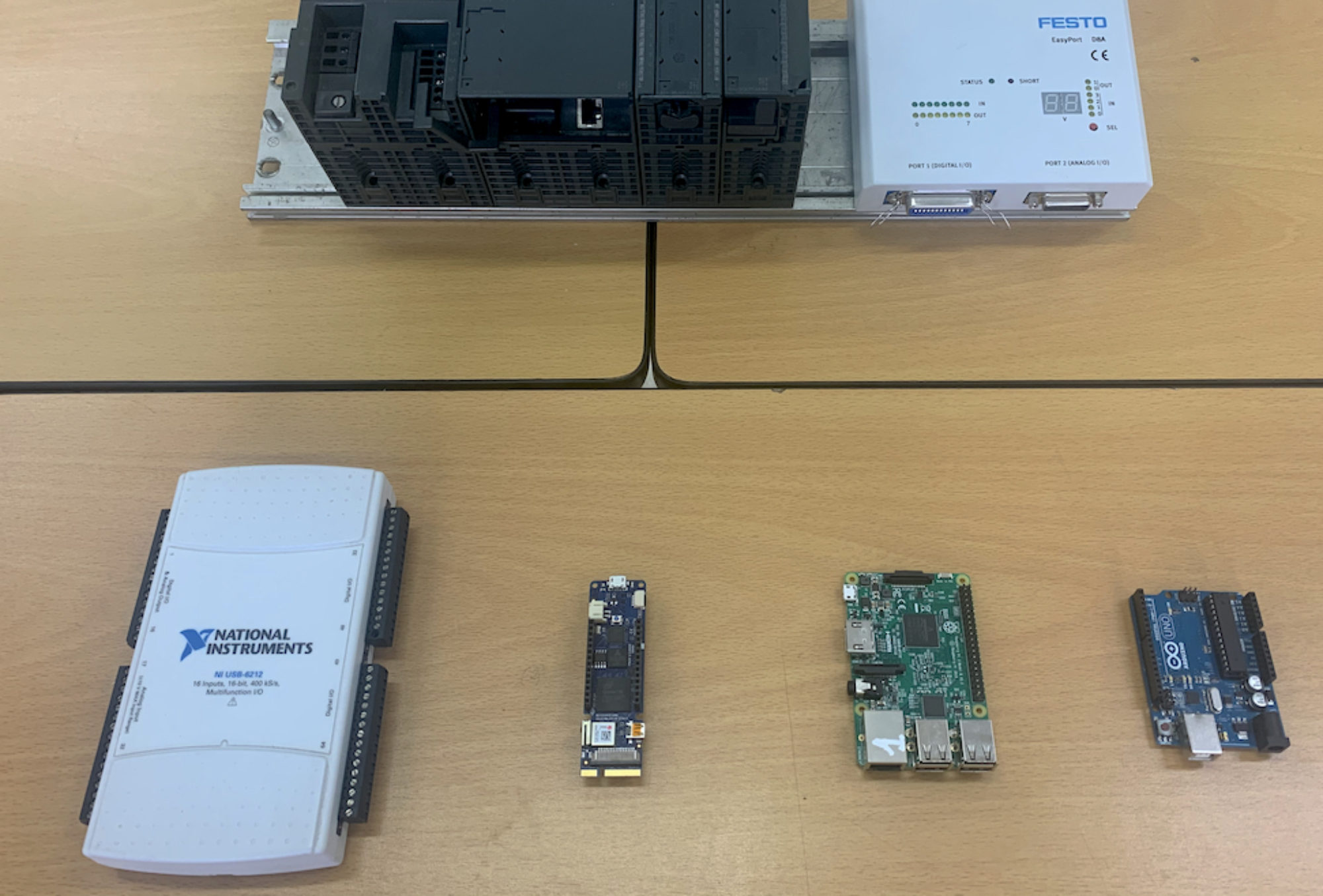
Todo comenzó con una simple medición. Tenía que conocer el diámetro interno del tubo de salida del láser, que resultó ser de 16 mm. Con esta medida en mente, me dispuse a diseñar la herramienta que necesitaba.
Paso 2: Comprobar medida con modelo impreso
Antes de realizar el diseño final, decidí hacer una prueba. Imprimí un cilindro de 15.8 mm de diámetro con un espesor de 1 mm. La idea era asegurarme de que encajaría perfectamente en el tubo de salida del láser. Lo mejor de todo es que si resultó así.
Objeto impreso en 3D para comprobar medida
Paso 3: Añadiendo Funcionalidad
Una vez comprobada la medida, diseñé un modelo con una base. Esta base me permitiría pegar una cinta sobre la cual se probaría el láser. Aunque esto cumplía con el objetivo que había pensado inicialmente, todavía tenía que verificar la calibración ‘al ojo’ debido a que mi única referencia era el círculo y mi percepción de distancia de donde golpeaba el láser respecto del círculo.
Objeto impreso en 3D con la funcionalidad para pegar cinta.
Paso 4: Ajustando el Diseño
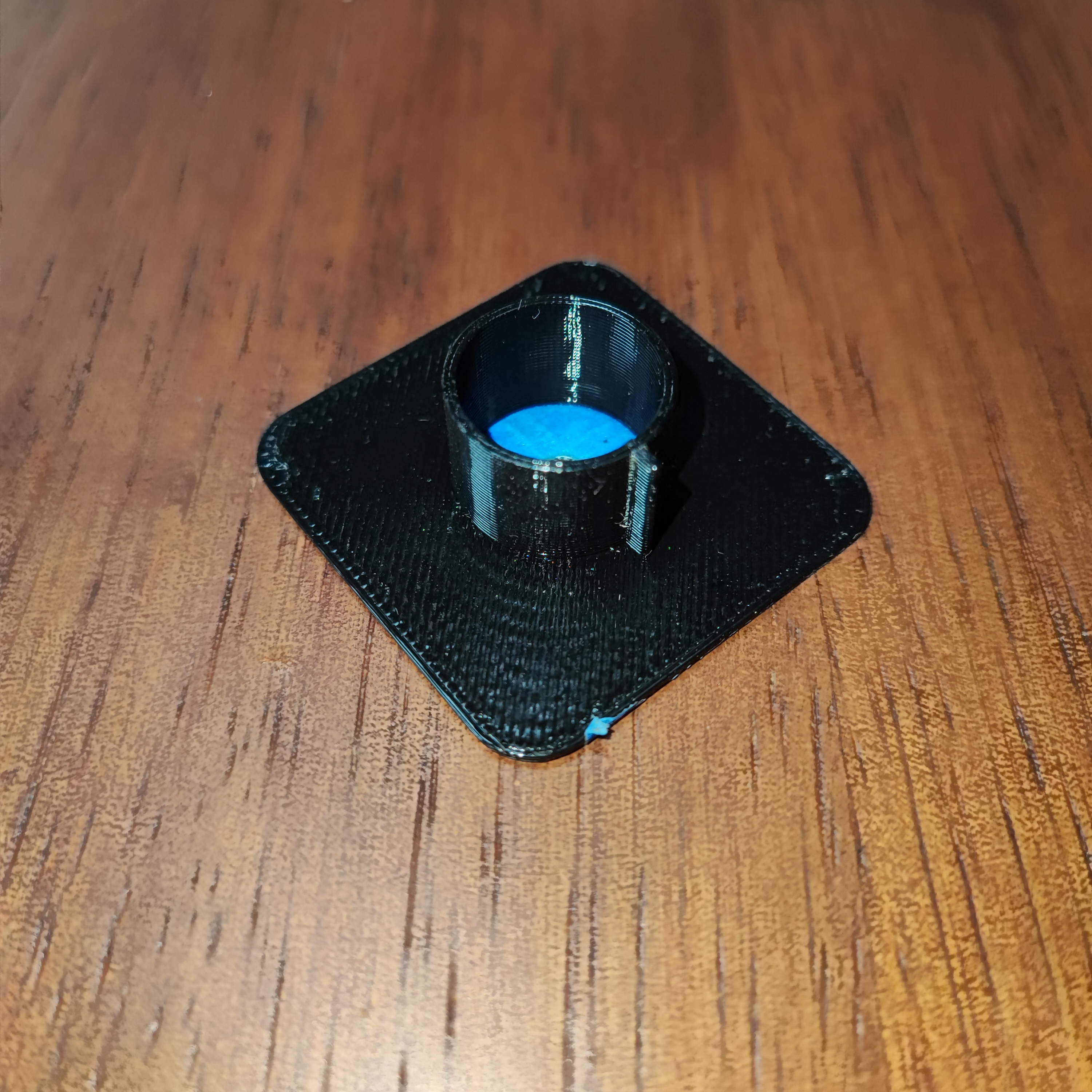
Para resolver el problema de la alineación, modifiqué el modelo para que tuviera una saliente. Esta saliente me permitía alinear la herramienta con el tubo de salida del láser de manera precisa. Fue un pequeño ajuste que hizo una gran diferencia.
Objeto impreso en 3D para alinear
Paso 5: La Plantilla de Calibración
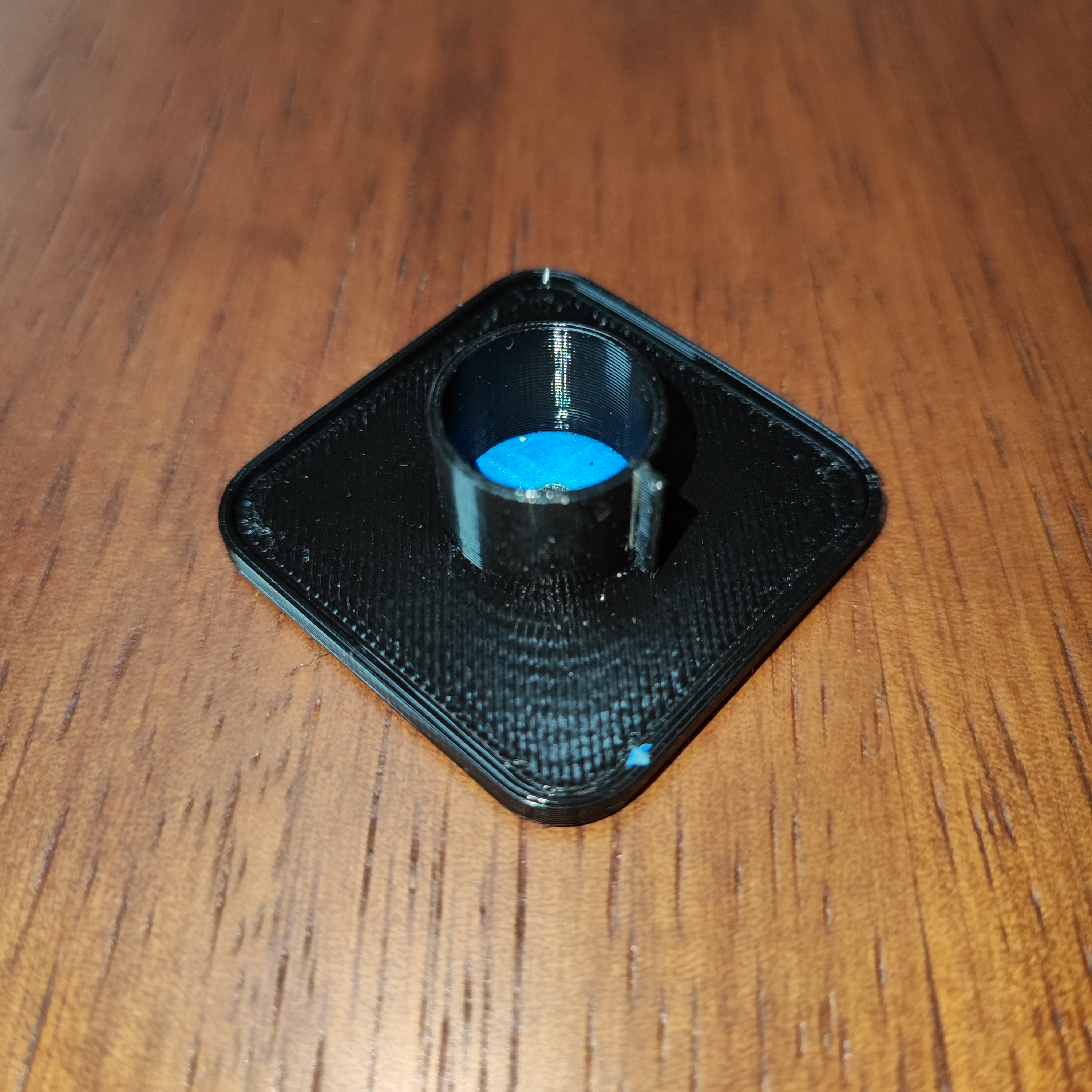
El toque final fue diseñar una plantilla que se acople a la primera pieza. Esta plantilla me permitiría marcar el centro del círculo, lo que permitiría calibrar adecuadamente la cortadora láser.
Plantilla impresa en 3D
Herramienta para Calibrar Cortadora Láser con Impresión 3D: Terminada
De esta forma la herramienta para calibrar el tercer espejo de una cortadora láser con impresión 3D quedó lista.
Conector y plantilla impresos en 3D
En esta imagen pueden observar como el conector encaja perfectamente con la parte que contiene la plantilla.
Herramienta para Calibrar Cortadora Láser con Impresión 3D
Conclusión
Aunque el proceso de calibración sigue siendo un proceso manual debido, con esta herramienta puedo tener la certeza de que el tercer espejo está alineado correctamente.
Esta herramienta me permite realizar el proceso de calibración en menor tiempo que si lo realizase sin esta herramienta. Finalmente, pude obtener un corte limpio.
MDF cortado con láser
Modelo
El modelo puede ser descargado desde el siguiente enlace:
¡Únete a la Celebración de la Innovación en el Arduino Day 2024!
¡Es ese momento del año otra vez! Nos complace anunciar que la Escuela de Mecatrónica de la Universidad Internacional del Ecuador (UIDE) está organizando el Arduino Day 2024, un evento lleno de tecnología, innovación y creatividad. Este día especial está dedicado a celebrar la comunidad de Arduino, aprendiendo y compartiendo nuevas ideas y proyectos impresionantes. Aquí tienes todo lo que necesitas saber sobre el evento y cómo puedes ser parte de él.
Fecha: 21 -03-2024
Lugar: Universidad Internacional del Ecuador, Av. Simón Bolívar y Av. Jorge Fernández.
Agenda del Evento
9h00 – Apertura del Evento El día comenzará con unas palabras de bienvenida por parte de la dirección de programa de nuestra Escuela de Mecatrónica. Prepárate para sumergirte en un mundo de tecnología e innovación.
9h30 – Presentación de la Agenda Los organizadores del evento te llevarán a través de la emocionante agenda del día, detallando todas las actividades y lo que puedes esperar de esta festividad tecnológica.
10h00 – 12h00 – Presentación Continua de Proyectos Creativos Desde las 10h00 hasta las 12h00, tendrás la oportunidad de explorar una variedad de proyectos creativos presentados por nuestros talentosos estudiantes.
10h00 – Demostración de Aerodeslizadores Sé testigo de la creatividad y la ingeniería en acción con nuestra competencia de aerodeslizadores. Además, disfruta de la presentación de proyectos creativos desarrollados por talentosos estudiantes.
11h00 – Competencia Mini Sumo Experimenta la emoción de la competencia mini sumo, donde la estrategia y la precisión mecánica se encuentran. Estudiantes talentosos también presentarán sus innovadores proyectos, demostrando su habilidad y creatividad.
11h30 – Concurso: Robots de Batalla Prepárate para la intensidad del concurso de robots de batalla. Es una oportunidad perfecta para ver la tecnología en acción y la pasión de los estudiantes por la robótica.
12h00 – Premiación de Proyectos Creativos 2023 y Clausura El evento culmina con la premiación a los proyectos más creativos del año pasado, celebrando la innovación y el esfuerzo excepcional de los participantes. Después, nos despediremos hasta el próximo año con unas palabras de clausura por parte del equipo organizador.
¿Por Qué Debes Asistir?
El Arduino Day es más que un evento; es una celebración global donde personas de todas las edades y habilidades se unen para compartir sus experiencias, proyectos y aprender unos de otros. Es una oportunidad increíble para:
Conectar con otros entusiastas de Arduino y la tecnología.
Aprender nuevas habilidades, técnicas y obtener inspiración para tus propios proyectos.
Compartir tus experiencias y proyectos con una comunidad que aprecia la innovación y la creatividad.
¿Estás listo para ser parte de esta emocionante jornada? Ya sea que seas un aficionado, un profesional experimentado o simplemente curioso por la tecnología, hay algo para ti en el Arduino Day 2024. ¡Marca tu calendario, trae tus ideas y prepárate para inspirarte!
Nos vemos en el Arduino Day, ¡donde la creatividad y la innovación cobran vida!
¡Es ese momento del año otra vez! Nos complace anunciar que la Escuela de Mecatrónica de la Universidad Internacional del Ecuador (UIDE) está organizando el Arduino Day 2025, un evento lleno de tecnología, innovación y creatividad. Este día especial está dedicado a celebrar la comunidad de Arduino, aprendiendo y compartiendo nuevas ideas y proyectos impresionantes. Aquí tienes todo lo que necesitas saber sobre el evento y cómo puedes ser parte de él.
Fecha: 21 -03-2025
Lugar: Universidad Internacional del Ecuador, Av. Simón Bolívar y Av. Jorge Fernández.
Agenda del Evento
9h00 – Apertura del Evento El día comenzará con unas palabras de bienvenida por parte de la dirección de programa de nuestra Escuela de Mecatrónica. Prepárate para sumergirte en un mundo de tecnología e innovación.
9h30 – Presentación de la Agenda Los organizadores del evento te llevarán a través de la emocionante agenda del día, detallando todas las actividades y lo que puedes esperar de esta festividad tecnológica.
10h00 – 12h00 – Presentación Continua de Proyectos Creativos Desde las 10h00 hasta las 12h00, tendrás la oportunidad de explorar una variedad de proyectos creativos presentados por nuestros talentosos estudiantes.
12h00 – Premiación de Proyectos Creativos 2024 y Clausura El evento culmina con la premiación a los proyectos más creativos del año pasado, celebrando la innovación y el esfuerzo excepcional de los participantes. Después, nos despediremos hasta el próximo año con unas palabras de clausura por parte del equipo organizador.
¿Por Qué Debes Asistir?
El Arduino Day es más que un evento; es una celebración global donde personas de todas las edades y habilidades se unen para compartir sus experiencias, proyectos y aprender unos de otros. Es una oportunidad increíble para:
Conectar con otros entusiastas de Arduino y la tecnología.
Aprender nuevas habilidades, técnicas y obtener inspiración para tus propios proyectos.
Compartir tus experiencias y proyectos con una comunidad que aprecia la innovación y la creatividad.
¿Estás listo para ser parte de esta emocionante jornada? Ya sea que seas un aficionado, un profesional experimentado o simplemente curioso por la tecnología, hay algo para ti en el Arduino Day 2025. ¡Marca tu calendario, trae tus ideas y prepárate para inspirarte!
Nos vemos en el Arduino Day, ¡donde la creatividad y la innovación cobran vida!
Descubre los proyectos innovadores el en Arduino Day en la Universidad Internacional del Ecuador, UIDE este 21 de marzo de 2024: desde el impresionante Router CNC ‘R.A.M.O.N.’ hasta el avanzado Sistema Automatizado General Grievous. Explora proyectos que fusionan arte, tecnología y educación, como nuestro homenaje a Star Wars con AT&AT, la precisión en ingeniería del Robot Iron Monger, y el innovador brazo robótico controlado por radiofrecuencia, que convierte señales inalámbricas en movimientos precisos. Sumérgete en el mundo del diseño y la robótica con nuestras creaciones, que destacan por su interactividad y precisión técnica. ¡No te pierdas este escaparate de ingenio y creatividad tecnológica!
Todos estos proyectos son el fruto del talento y la innovación de los estudiantes de la Escuela de Mecatrónica de la UIDE, quienes han aplicado sus conocimientos y habilidades para crear soluciones tecnológicas que no solo desafían los límites de la creatividad, sino que también reflejan el potencial práctico de la educación en mecatrónica. Estos trabajos estudiantes destacan la aplicación de teoría y práctica en armonía para producir tecnología que inspira y lidera el camino hacia el futuro de la ingeniería.
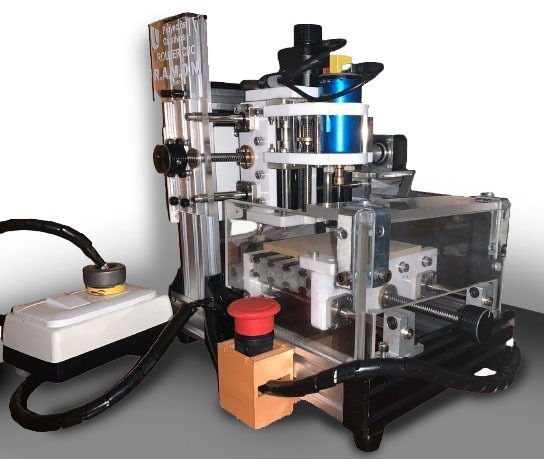
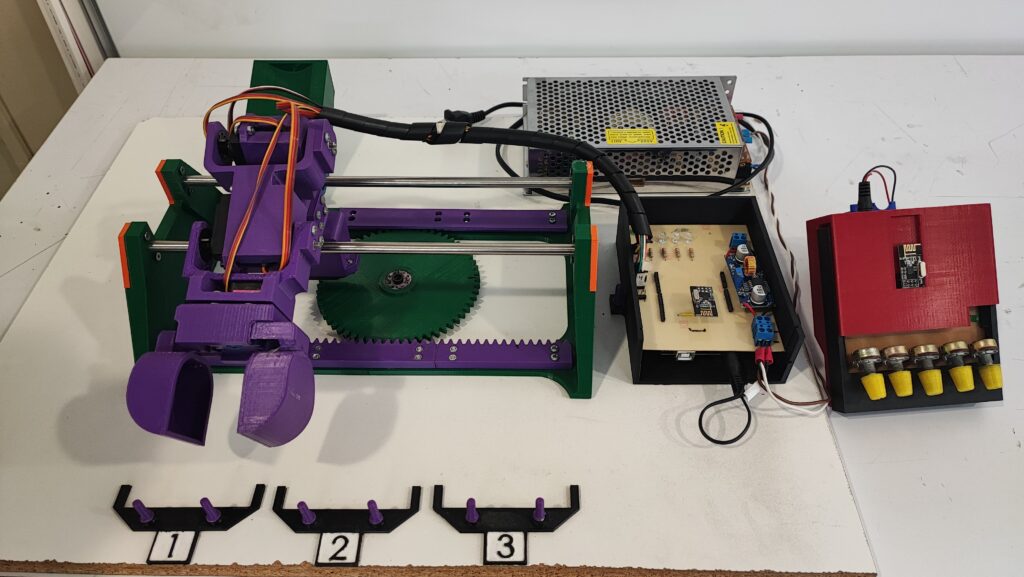
Router CNC “R.A.M.O.N.”
Esta CNC router miniatura es una réplica funcional a escala de su contraparte industrial, con una estructura transparente que permite una vista detallada de su mecanismo interno. Dotada con ejes de precisión y un área de trabajo compacta, es ideal para pequeños proyectos de grabado y corte en MDF y otros materiales ligeros. Su diseño incluye controles manuales y de emergencia, reflejando la funcionalidad de las máquinas de tamaño completo en un formato educativo o de demostración.
Proyecto desarrollado por:
José Arévalo, Mateo Martínez, Martín Molina, Romina Mora, Ian Páez
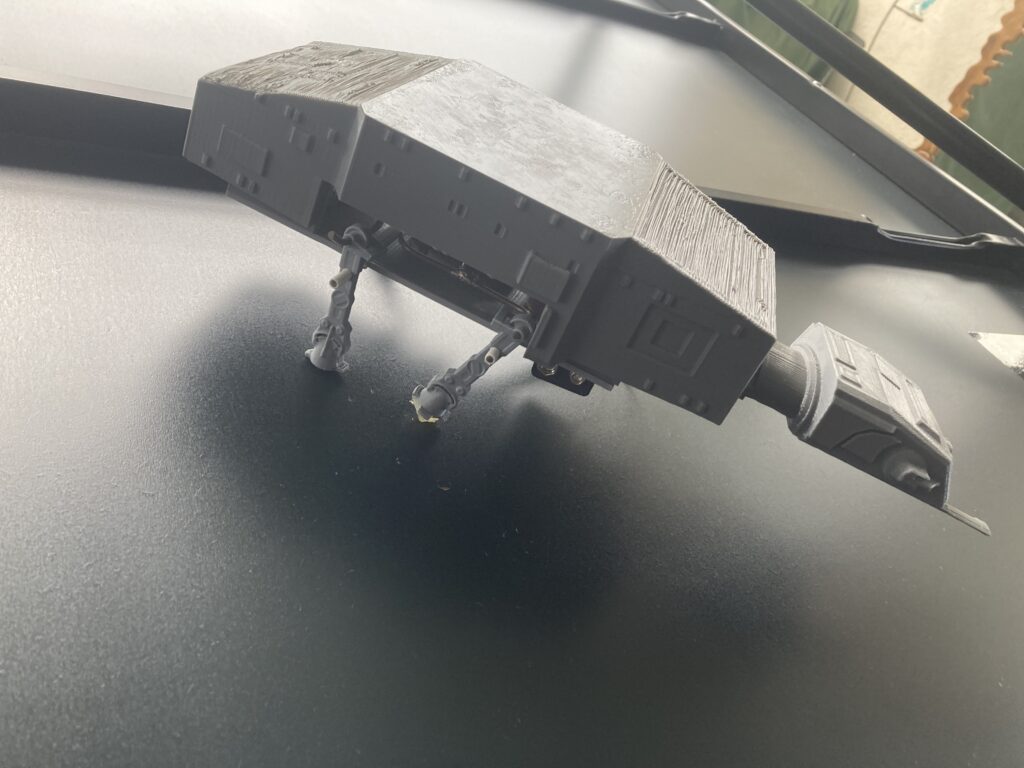
AT&AT
Este robot emula la estética y movilidad de los droides de Star Wars, con una mecánica que permite movimientos fluidos y precisos. Su diseño captura la avanzada tecnología de la saga, ofreciendo un homenaje funcional a la icónica serie de ciencia ficción.
Proyecto desarrollado por:
Steven Ramirez, Alejandro Vera, Christian Cabascango
Router CNC
Esta máquina de corte por control numérico se integra directamente con un computador para interpretar código G, permitiendo ejecutar cortes precisos a través de un hilo caliente. Diseñada específicamente para trabajar con espuma flexible, su tecnología de corte térmico es ideal para esculpir y modelar este material con gran exactitud y eficiencia.
Proyecto desarrollado por:
César Mejía, Paúl Cabadiana, Mireya Tacuri, David Arcentales
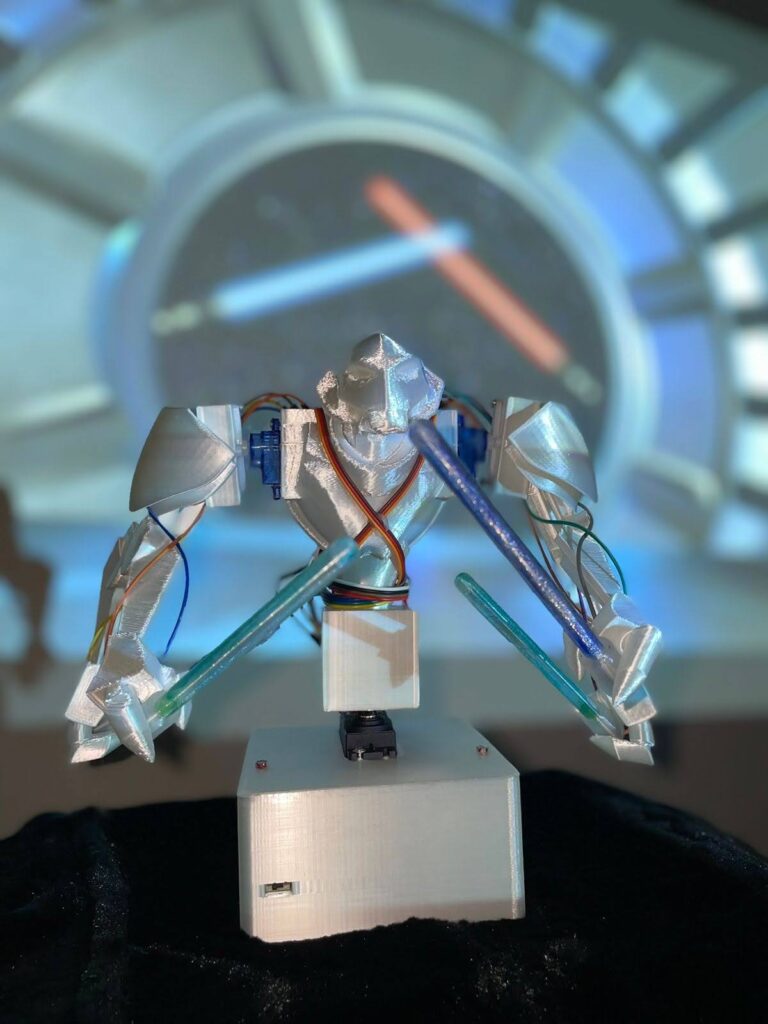
Sistema Automatizado General Griveous
Robot inspirado en General Grievous con servomotores para movimientos en tres ejes y luces LED sensibles a la luz que responden al ambiente, creando una interacción viva y adaptable.
Proyecto desarrollado por:
Corina Haro, Damián Mueses, Diego Crespo
Robot Iron Monger
Esta figura robótica articulada realiza cuatro acciones dinámicas: rotación de cabeza, movimiento de brazo, iluminación en casco y pecho, y emisión de sonidos de sonar para una interactividad completa.
Proyecto desarrollado por:
Esteban Gavilánez, Jhoel Zumba, Luis Fernández
Brazo teleoperativo
Explora este brazo robótico avanzado, controlado precisamente por radiofrecuencia. Convierte señales inalámbricas en movimientos exactos, ideal para tareas que necesitan alta precisión y flexibilidad, perfecto para aplicaciones educativas , ofreciendo rendimiento excepcional e interactividad innovadora
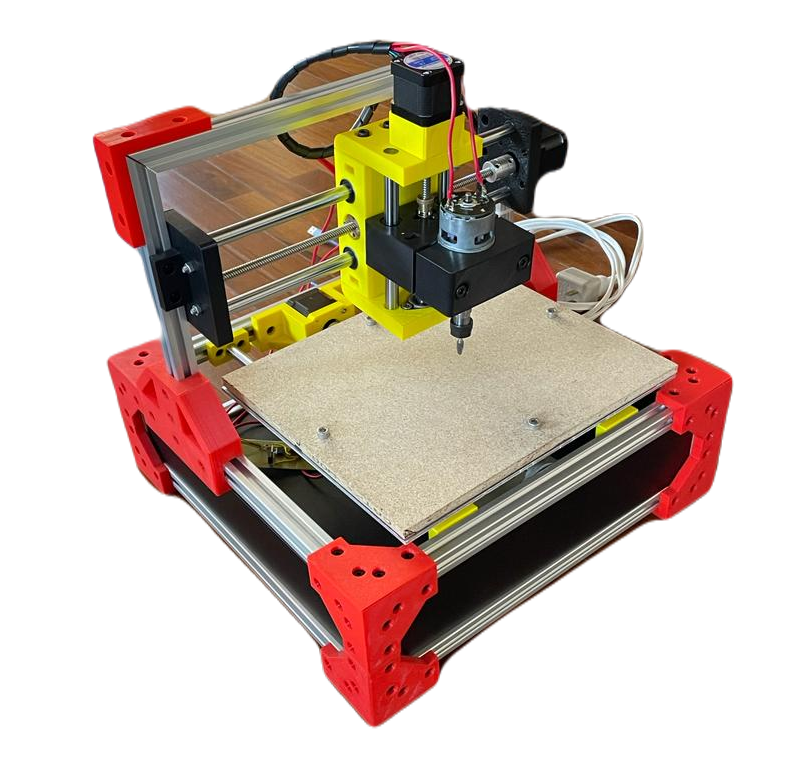
Fresadora CNC
Experimenta la precisión en el maquinado CNC, creando figuras meticulosas en MDF de 9mm. Nuestra tecnología esculpe con exactitud, ofreciendo acabados de alta calidad y diseños personalizados.
Proyecto desarrollado por:
Esteban Osejo, Ismael Paredes, Martin Soto
BAYMAX
Explora esta figura interactiva basada en Baymax, equipada con funciones activables mediante pulsadores. Diseñada para interactuar y responder, esta figura aúna sencillez y funcionalidad, permitiendo a los usuarios experimentar directamente con la tecnología.
Proyecto desarrollado por:
Mateo Casignia, Marco Aguilar, Dyllan Ortiz
Deadpool
Conoce al animatrónico inspirado en el icónico antihéroe, equipado con servomotores para movimientos fluidos y expresivos. Este ingenioso artefacto capta la esencia del personaje con su agilidad y característico humor, ofreciendo entretenimiento dinámico y una presencia que roba miradas.
Proyecto desarrollado por:
Pamela Quinga, Alexander Medina
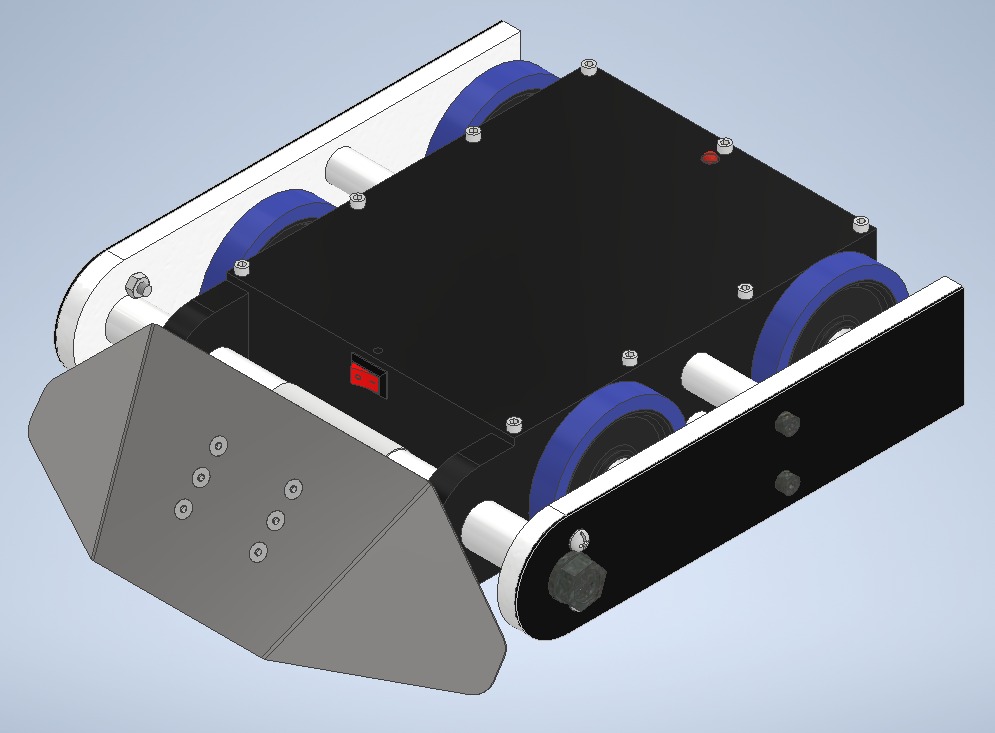
Rhino
Un robot de batalla compacto, con tracción robusta y un chasis reforzado listo para cualquier desafío. Este coloso mecánico es la fusión perfecta de potencia y precisión, diseñado para dominar en la arena. ¡Prepárate para la acción!
Proyecto desarrollado por:
Agustín Murtagh, Matias Vaca, Mijahel Guerrón
BMO
Descubre nuestro encantador robot inspirado en BMO, diseñado para ser tu compañero musical. Con una estética amistosa y colores vivos, no solo reproduce tus melodías favoritas, sino que también acompaña el ritmo con movimientos de brazos, añadiendo un toque de alegría a cualquier espacio.
Proyecto desarrollado por:
Felipe Boutto, Andrés Vélez, Frank Manosalvas, Michelle Quevedo
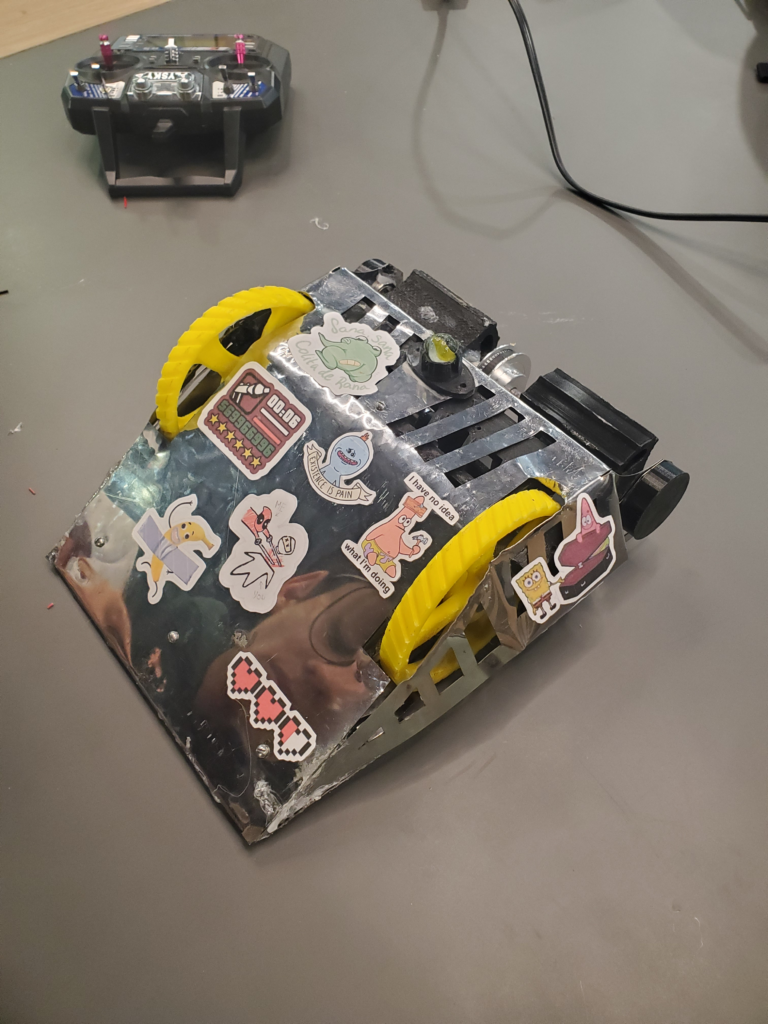
JACOB
Un robot de batalla que combina potencia y personalidad. Decorado con pegatinas que reflejan su espíritu indomable, este combatiente cuenta con agarres resistentes y un chasis preparado para la acción. ¡Todo listo para el próximo reto de ingenio y fuerza!
Proyecto desarrollado por:
Emilio Aguilar, David Arroyo, David Reyes, Gabriel Albán
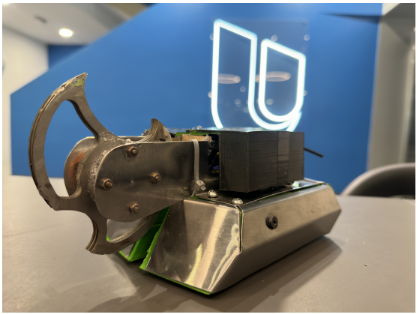
Invictus Interfector
Equipado con una garra capaz de desafiar a cualquier adversario, este robot es una muestra de destreza técnica y diseño estratégico, ideal para aquellos que buscan conquistar la arena con fuerza.
Proyecto desarrollado por:
Mathew Lara, Joel Molina, Joel Rubio
Aerodeslizador
¡Listo para despegar! Nuestro aerodeslizador combina diseño práctico y funcionalidad, deslizándose sobre el suelo con facilidad y estilo, listo para la aventura.
Proyecto desarrollado por:
Samuel Peña
GrootLamp
GrootLamp es una lámpara de noche inspirada en el personaje Groot con un diseño amigable y colorido específicamente basado en su versión Chibi que cuenta con pulsadores los cuales activan sus diferentes funciones siendo estas el movimiento de su cabeza periódicamente, movimiento de brazos que simula un baile y finalmente reproducción de su voz seguida de su canción icónica. Siendo esta diseñada mayoritariamente para el uso infantil GrootLamp ofrece luz durante toda la noche además de sus acciones interactivas.
El prototipo incluye una estructura mecánica que permite que el robot se desplace de manera similar al personaje BB-8. Además, está equipado con un circuito electrónico que le permite moverse hacia adelante, hacia atrás y girar sobre su eje vertical para simular la movilidad de BB-8. En lugar de una aplicación móvil completa, el prototipo puede ser controlado manualmente a través de una aplicación creada exclusivamente para la movilidad del prototipo compatible con el módulo Bluetooth. Incluso el prototipo puede tener funciones básicas, como el encendido de luces LED en su carcasa para emular el aspecto de BB-8 y reproducir sonidos característicos.
Proyecto desarrollado por:
Alex Fiallos, Hugo Caizaluisa, Jonathan Tupiza
DroidPod
El DroidPod es un mecanismo motorizado que permite mover la cámara de forma suave y controlada a lo largo de un riel horizontal. Utiliza un controlador Arduino para gestionar el movimiento del motor, permitiendo ajustar la velocidad y la distancia recorrida. Puede ser controlado manualmente mediante la computadora de forma automática mediante programación, lo que lo hace ideal para capturar tomas de lapso de tiempo o realizar movimientos precisos durante la grabación de video.
Proyecto desarrollado por:
Martín Roberto Aguirre Toapanta
Conoce la agenda del evento en el siguiente enlace:
Para representar las ecuaciones diferenciales en simulink debe seguir los siguientes pasos:
Identificar la derivada de mayor orden y agregar bloques integradores.
Resolver para la derivada de mayor orden.
Representar el lado derecho de la ecuación
Modelo matemático
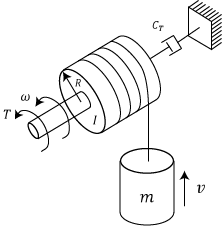
Considere el sistema de la figura en el cual se puede apreciar que se aplica un torque en un extremo del sistema, mientras que al otro extremo se encuentra un amortiguador torsional de coeficiente C_T.
La polea tiene un momento de inercia I y su radio tiene el valor R. La masa que está siendo levantada tiene un valor de m.
El modelo matemático del sistema es el siguiente:
T*R = (I+m*R^{2})*x^{\prime\prime}+C_T*x^{\prime}
En este tutorial se utiliza la versión de matlab 2021b.
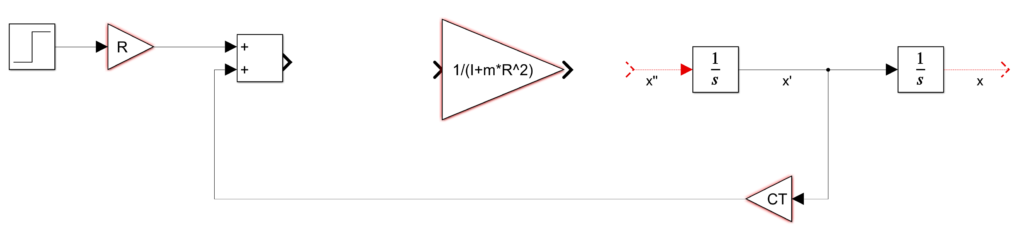
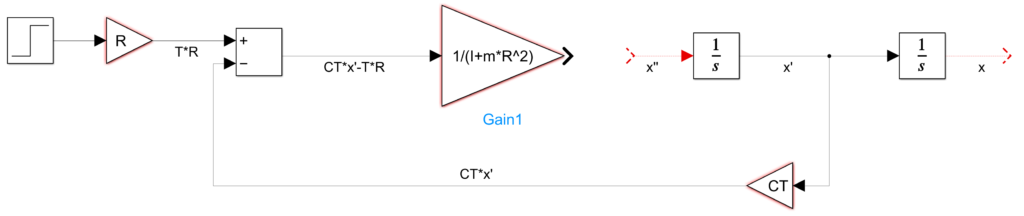
Representación del modelo matemático
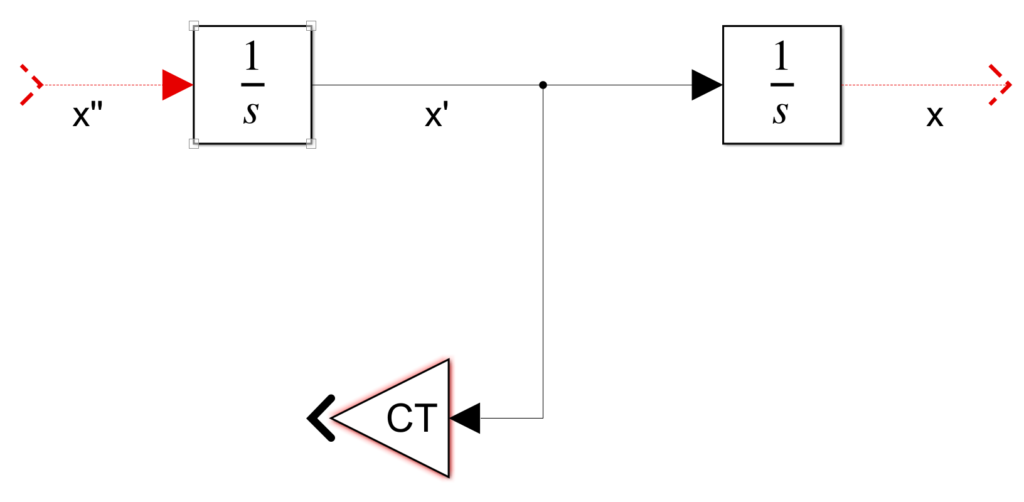
Conectar integradores
En este ejemplo la derivada de mayor orden es de segundo orden; por lo tanto, se deben agregar dos bloques integrador (Integrator).
Conecte los integradores en serie, y agregue conectores tanto al inicio como al final de los bloques.
Puede agregar etiquetas a los conectores dando doble click en cada uno de ellos para indicar las variables utilizadas.
Resolver para la derivada de mayor orden
Representar el lado derecho de la ecuación
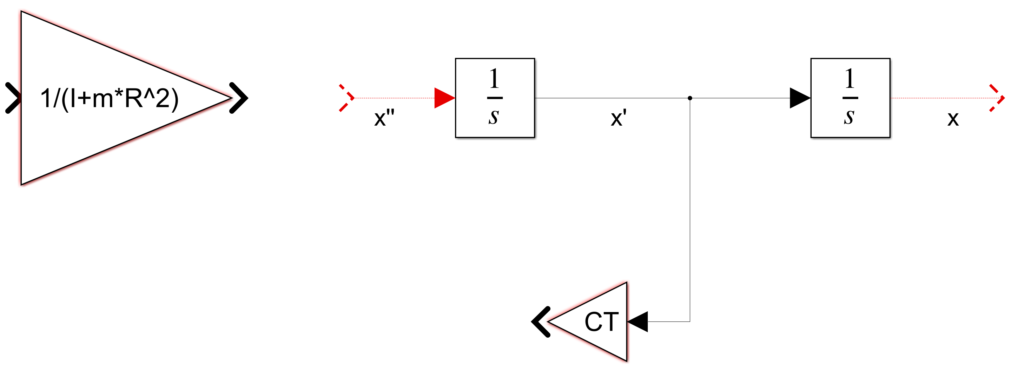
Ganancias
Los factores deben ser representados por medio de bloques de ganancia(gain).
Primero, se representará el termino C_T*x^{\prime}
El factor C_T está multiplicando a la variable x^{\prime} ; entonces, en el bloque de ganancia se debe utilizar C_T. La entrada debe ser conectada al conector x^{\prime} .
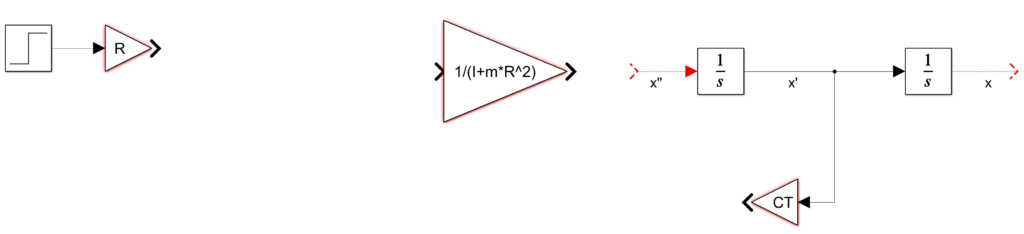
Otro factor es \frac{1}{(I+m*R^{2})} , el cual está multiplicando a todo lo que se encuentra en el lado derecho de la ecuación. Para este senecesita un nuevo bloque de ganancia. Por el momento no será conectado. Si el bloque de ganancia indica -K-, significa que no puede mostrar todo el contenido. Esto se soluciona aumentando el tamaño del bloque.
Para el torque aplicado T se utilizará una entrada del tipo escalón. Para esto se requiere agregar el bloque «Step». Adicional, se necesita un bloque de ganancia para el factor R
Bloque sumador
Para completar el modelo se necesita un bloque sumador y poder completar la operación del lado derecho de la ecuación. Agregue el bloque sumador(Add) y conecte la salida de la ganancia con el el factor C_T. También, conecte la salida de la ganancia R .
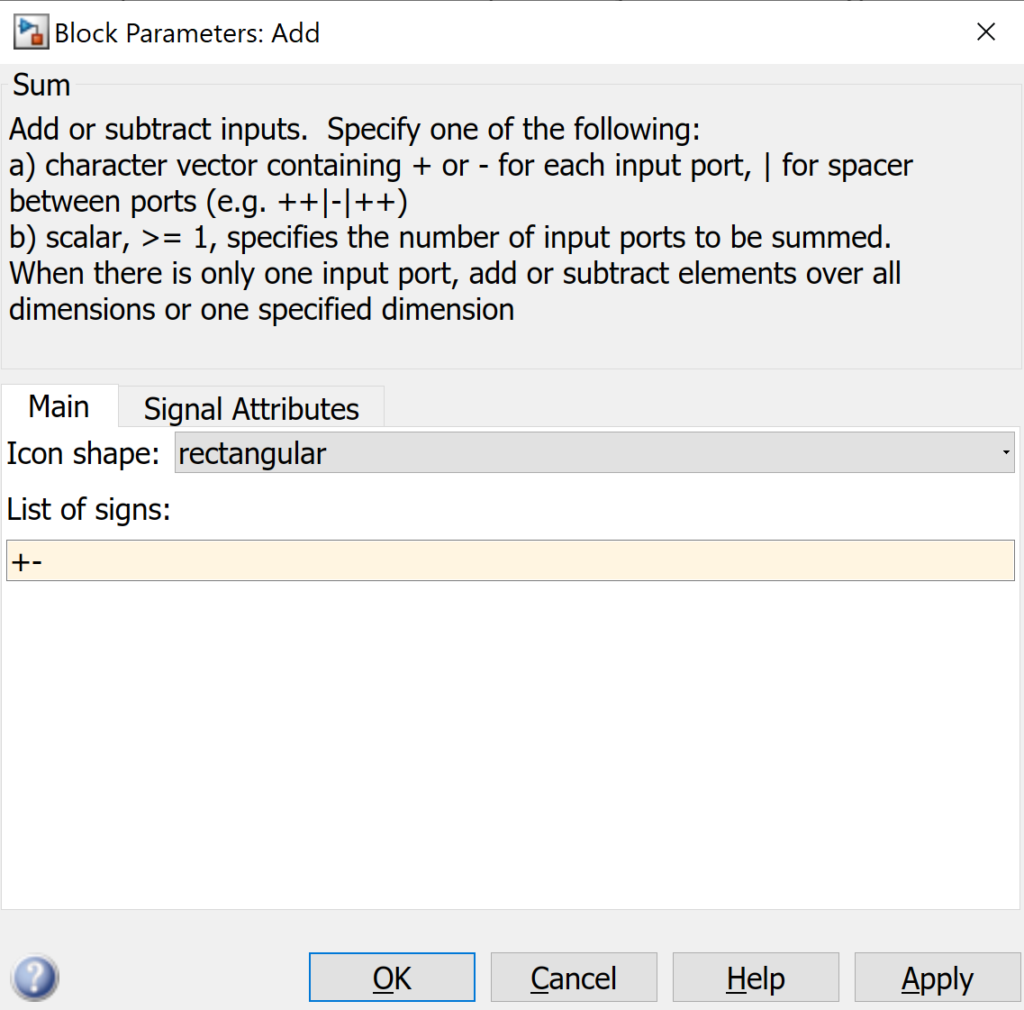
Se puede observar que se tienen un término positivo y un término negativo. Para ajustar esto en el bloque sumador. Se debe dar doble click en el bloque para editar sus propiedades.
Configure el bloque de la siguiente forma y acepte los cambios.
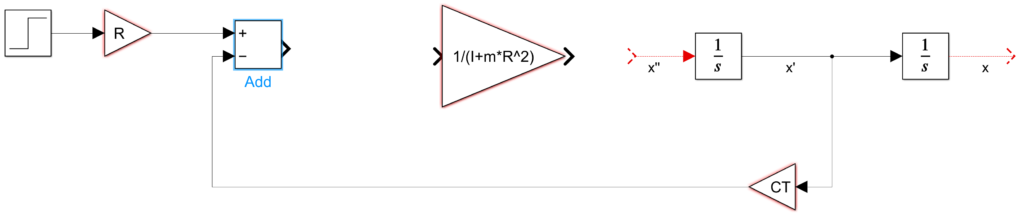
Como resultado se puede observa que el bloque sumador tiene ahora una entrada con signo negativo
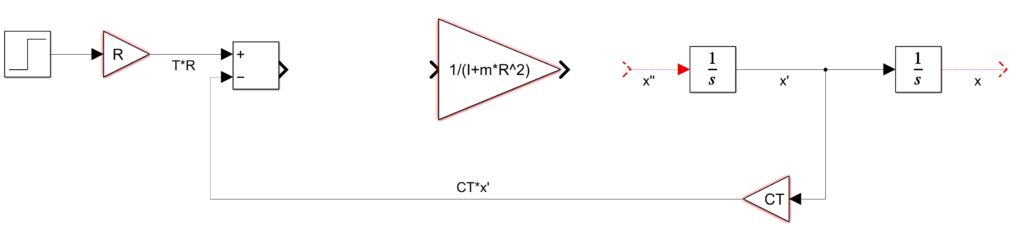
Antes de realizar las conexiones faltantes se muestra las etiquetas de los conectores de las salidas de las ganancias.
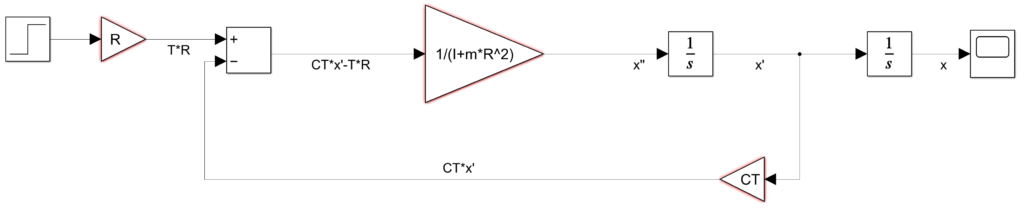
La salida del sumador se conecta a la entrada de la ganancia \frac{1}{(I+m*R^{2})} .
Se puede observar la salida del bloque sumador (Add) representa la diferencia presente al lado derecho de la ecuación y al ser multiplicado por la ganancia se obtendría x^{\prime\prime}. Para poder medir la posición de la masa se utiliza un scope conectado a la salida del último integrador.
A la salida de la ganancia de mayor tamaño se tiene la expresión \frac{1}{I+m*R^{2}}*(C_T-T*R) lo cual equivale a x^{\prime\prime}
Declaración de variables
Al momento se puede observar que las ganancias tienen un borde rojo indicando que existe un error. Esto es debido a que la constantes no han sido definidas.
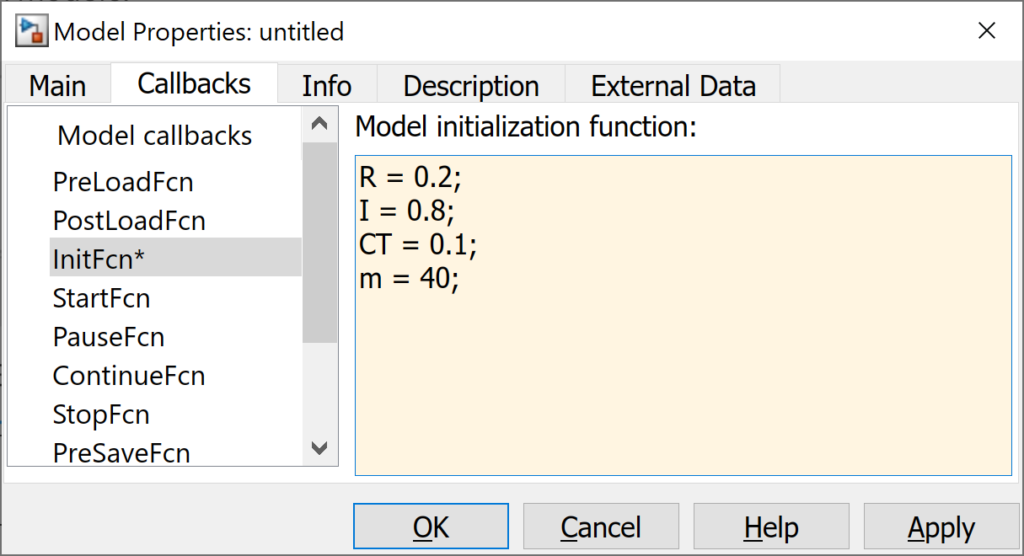
Ingrese en las propiedades del modelo.
Configure los siguientes datos del modelo en el Callback InitFcn:
R = 0.2\,m \\I = 0.8\,kg \cdot m^2 \\C_T=0.1\,N \cdot m \cdot s \\m = 40\,kg
De esta forma las variables se quedan guardadas en el modelo y se cargarán cuando se ejecute el modelo.
Aplique los cambios y ejecute la simulación del modelo.
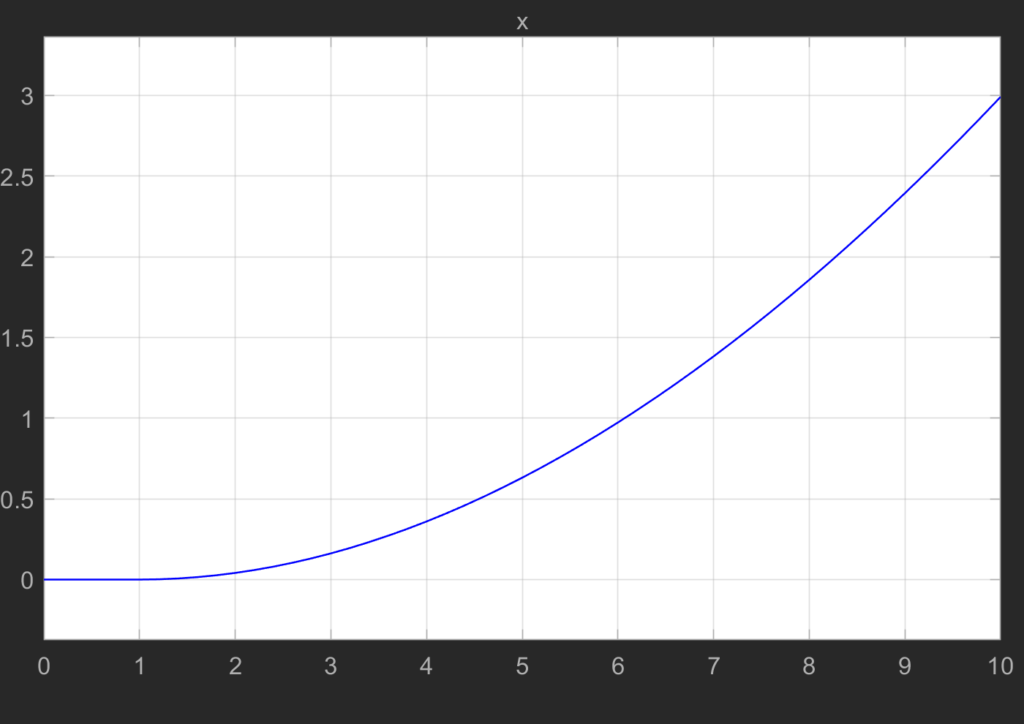
Debe obtener el siguiente resultado de la posición del objeto de masa m .
Palm, W. J. (2005). System dynamics(2nd ed). Boston: McGraw-Hill Higher Education.
Simulación de mecanismo piñón-cremallera en simulink
Esta ocasión, les mostraremos como representar de forma conceptual un mecanismo piñón-cremallera en simulink utilizando los elementos de la biblioteca simscape multibody.
Para iniciar, se debe crear un archivo nuevo de simulink y agregar los elementos básicos necesarios para modelos utilizando la biblioteca de simscape multibody. Todos los elementos que se utilizarán se encuentran en Simscape -> Multibody.
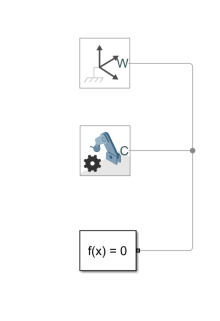
Dentro de Utilities, agregar Mechanism Configuration. De «Frames and Transforms» agregar «World Frame». Ademas, agregar de Simscape->Utilities el elemento «Solver Configuration» y conectar los elementos como se muestra en la figura.
Conexión de elementos básicos para trabajar con simscape multibody
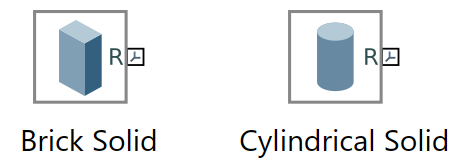
Luego, desde «Body elements» se deben agregar los elementos «Brick Solid» y «Cylindrical Solid».
Brick y Cylindrical Solids
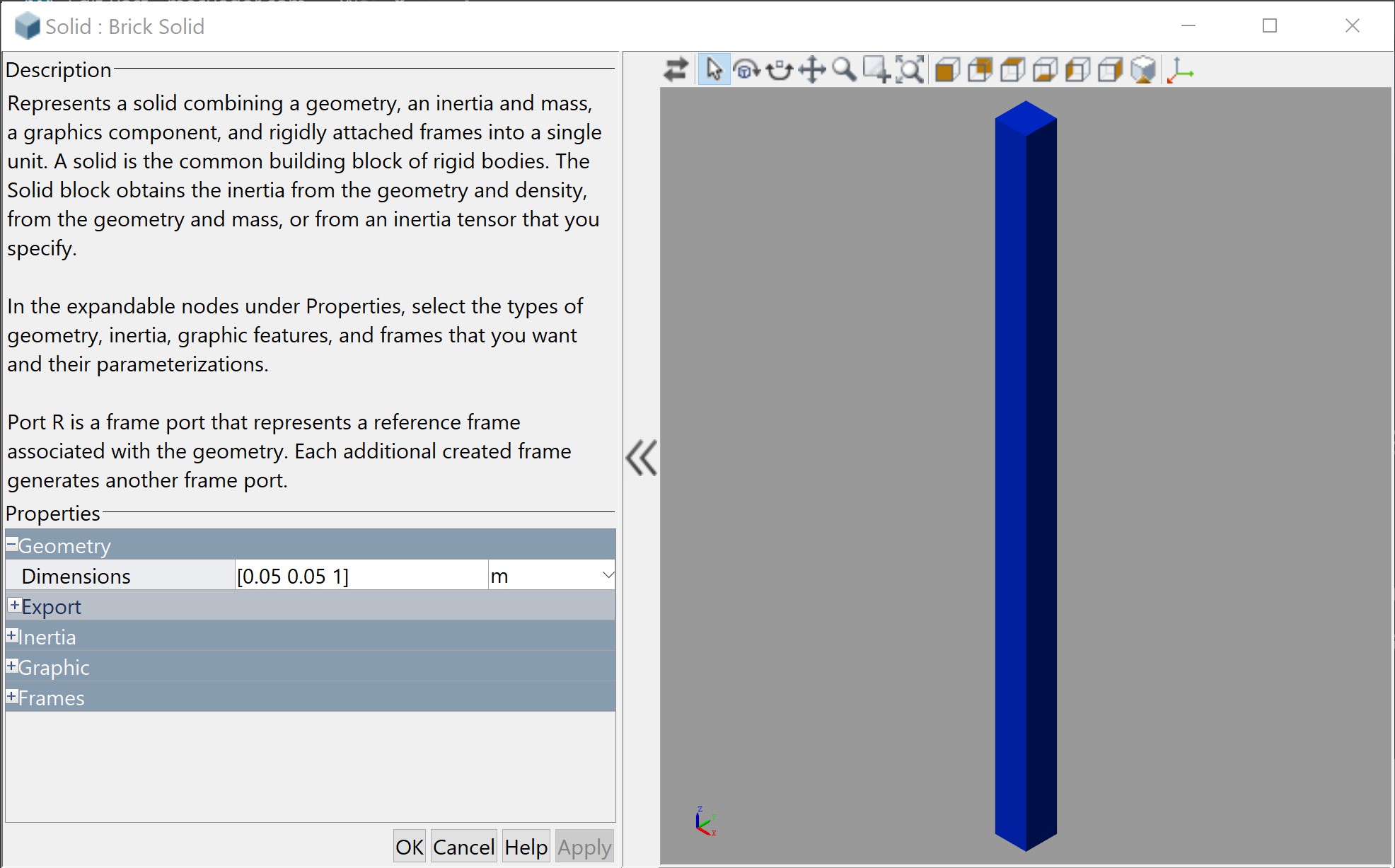
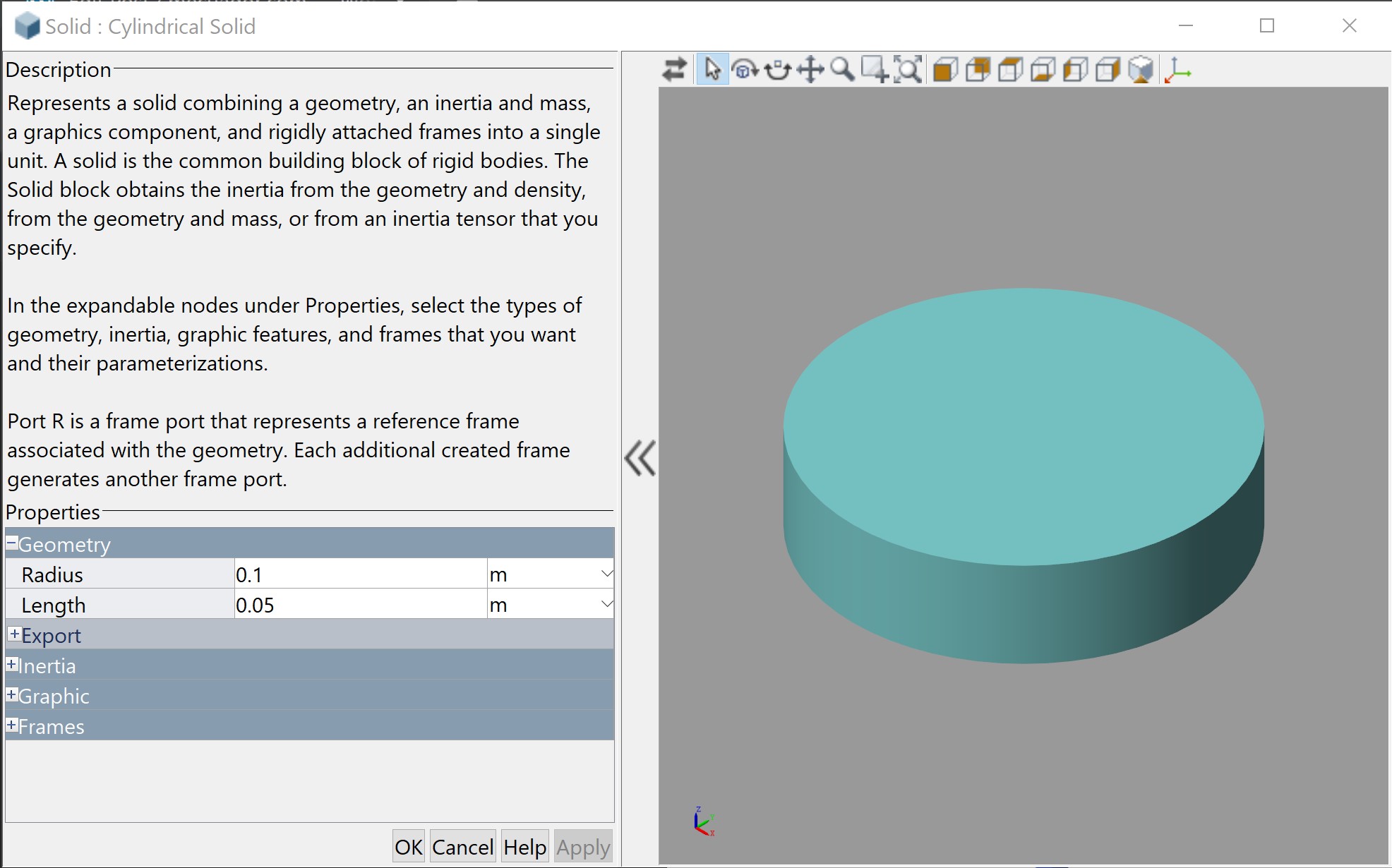
Seguidamente, configure los elementos como se muestra a continuación. (Utilice el deslizador de las fotografías para poder ver la configuración de cada elemento)
Propiedades de sólidos
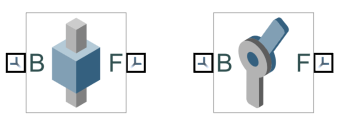
Además, desde «Joints«, agregue las juntas «Prismatic» y «Revolute» al modelo.
Primatic y Revolute Joint
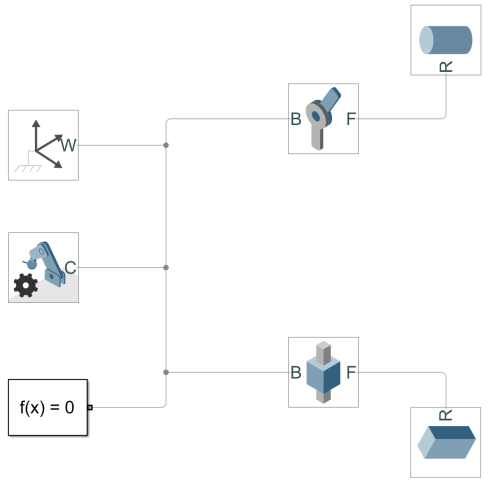
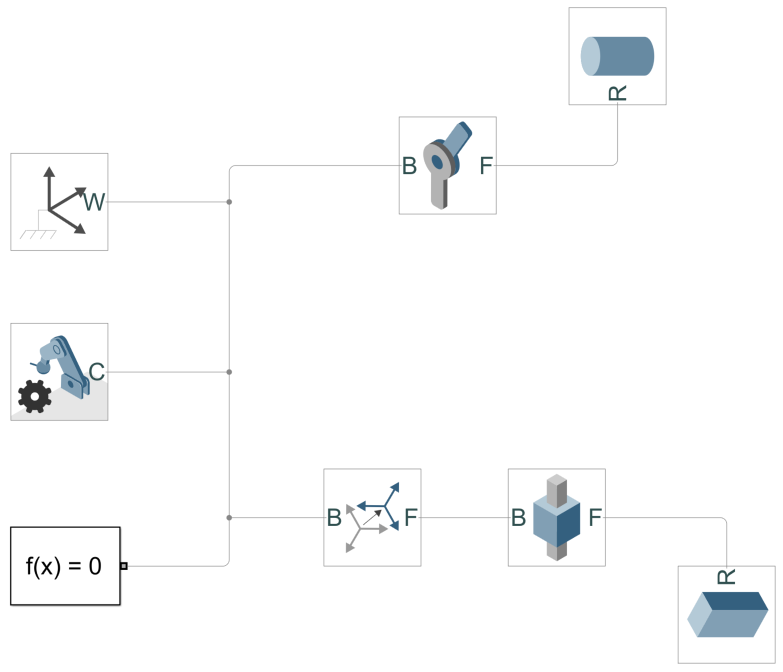
Utilice las juntas para relacionar los solidos que fueron configurados de acuerdo con la siguiente figura y asegúrese que los puertos B estén conectados con el «Reference World».
Conexión de Brick y Cylindrical Solids
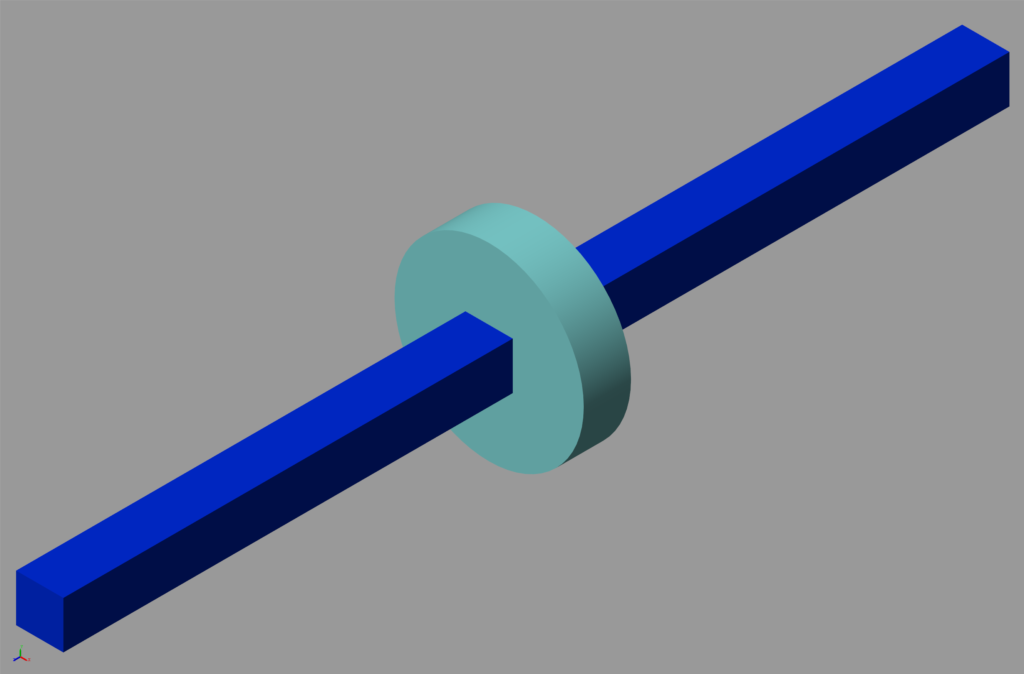
Como resultado, al ejecutar la simulación, el sistema debe mostrarse de la siguiente forma en el Mechanics Explorers:
Resultado Preliminar del sistema
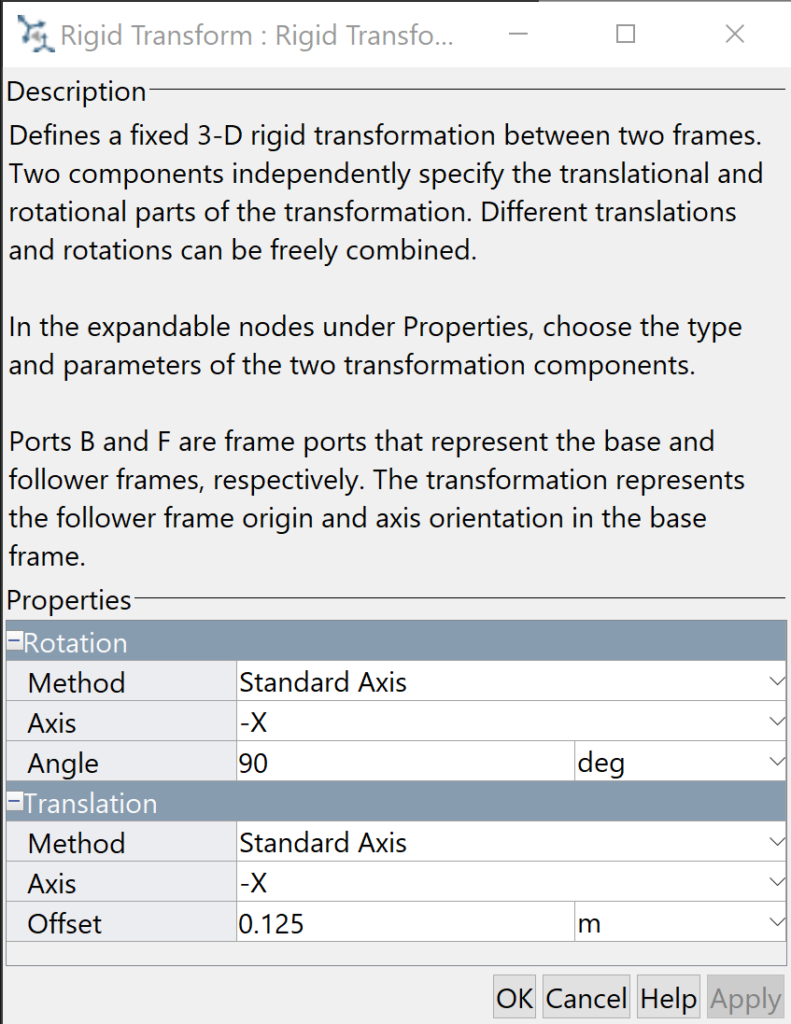
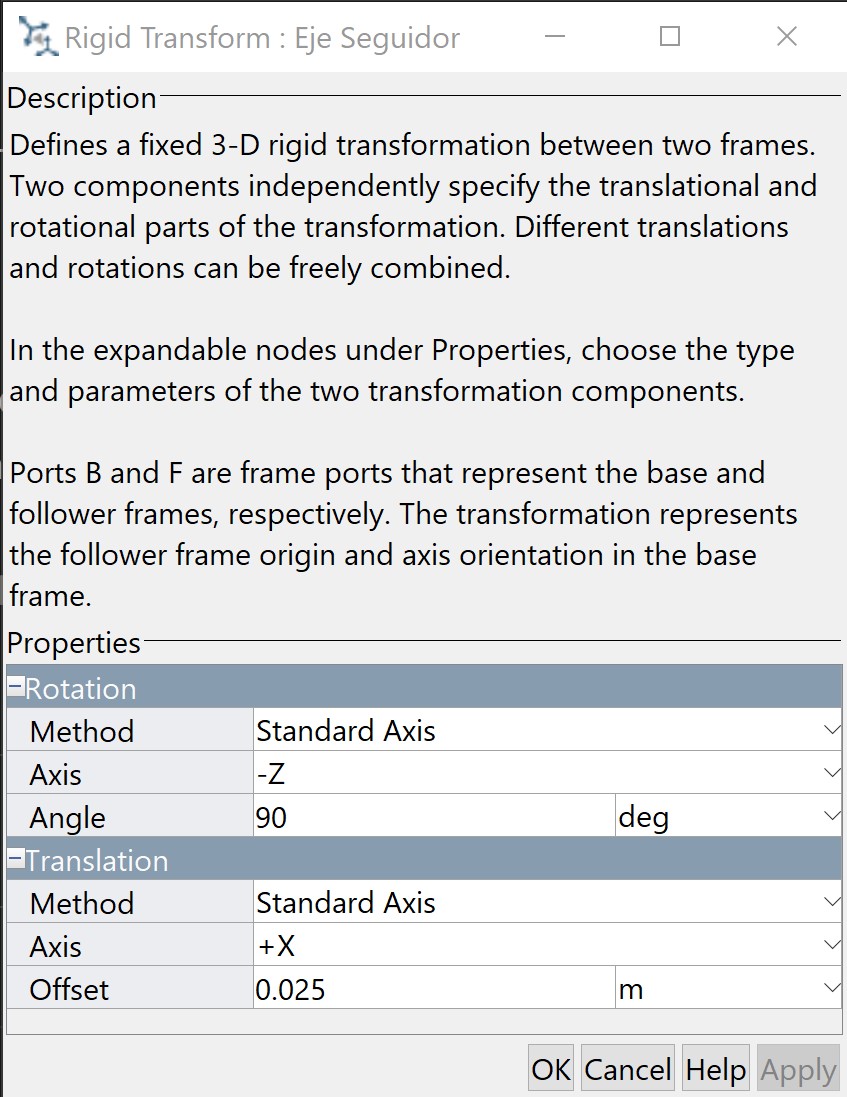
Es importante que la convención de visualización es que el eje Y corresponde al eje vertical. Se puede observar que no está posicionado para poder establecer una relación de piñón-cremallera entre los dos elementos. Para posicionar de forma adecuada el elemento que representa a la cremallera se debe utilizar un elemento «Rigid Transform», el cual se encuentra Frames and Transforms.
Este elemento debe ser configurado de la siguiente forma:
Configuración de Rigid Transform
Consecuentemente, conéctelo entre el «World Frame» y «Prismatic Joint». El elemento «Rigid Transform» permite crear puntos de conexión con base en los ejes de referencia presentes en el modelo.
Conexión de Rigid Transform
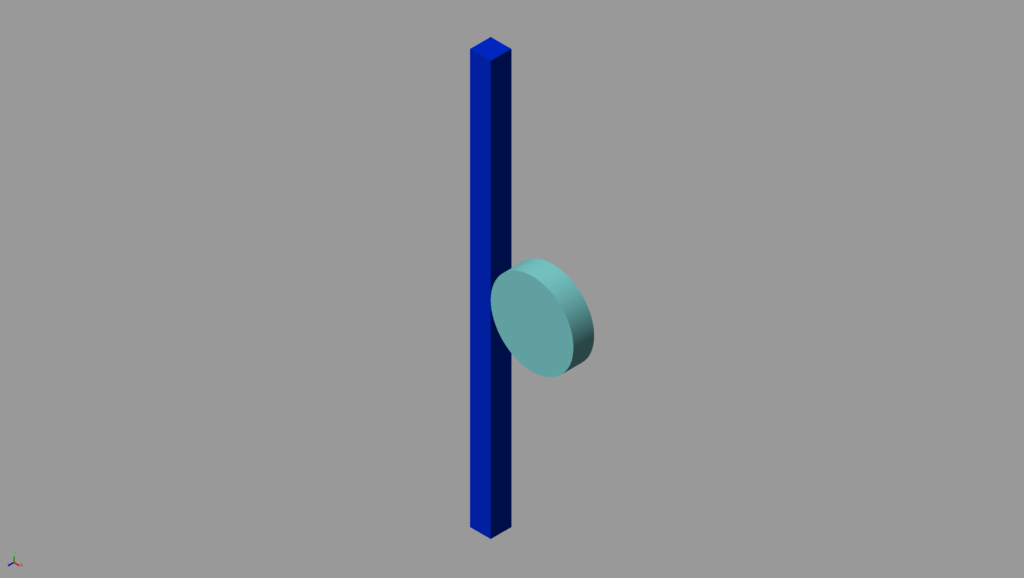
Al momento de ejecutar el modelo debe visualizarse de la siguiente forma en el Mechanics Explorer.
Orientación correcta del elemento que representa la cremallera
Conexión piñón-cremallera
Una vez realizado esto se puede agregar la restricción de piñón-cremallera para lo cual es necesario crear puntos de conexión utilizando el elemento «Rigid Transform» debido a que los ejes de referencia no permitirán que el sistema sea ensamblado correctamente.
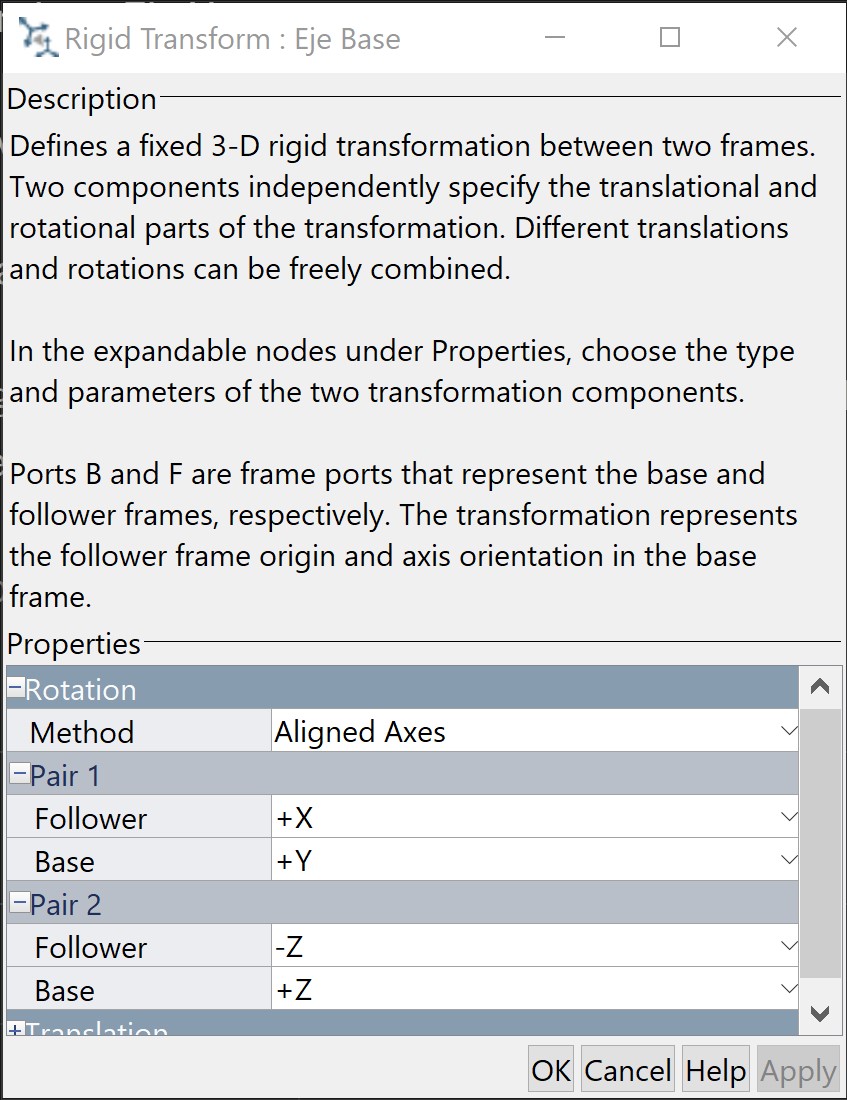
Según la descripción del elemento «Rack and Pinion Constraint» se debe cumplir con lo siguiente: El piñón debe girar alrededor del eje z base y la cremallera se desplaza a lo largo del eje z seguidor. En la configuración inicial, el eje z del seguidor es paralelo al eje x de la base. El eje del seguidor descansa en el eje negativo de las y de la base. Tanto el eje y de la base como del seguidor son paralelos. Durante la simulación, el piñón y la cremallera deben ser alineados por el resto del mecanismo. Dentro de este bloque solo se debe configurar el radio del piñón, el cual para este caso es de 0.1 m.
En la siguiente figura se representa como deben estar colocados los ejes de referencia que servirán para realizar la conexión del «Rack and Pinion Constraint».
Representación de ejes de referencia
Donde los ejes pueden ser identificados de acuerdo con los colores:
Rojo -> Eje X
Verde -> Eje Y
Azul -> Eje Z
El eje del seguidor debe estar ubicado a una distancia igual al radio del piñón medida desde el eje de referencia base.
A continuación, se muestra como deben ser configurados ambos bloques de «Rigid Transform» tanto para la base como para el seguidor.
Configuración de Rigid Transforms
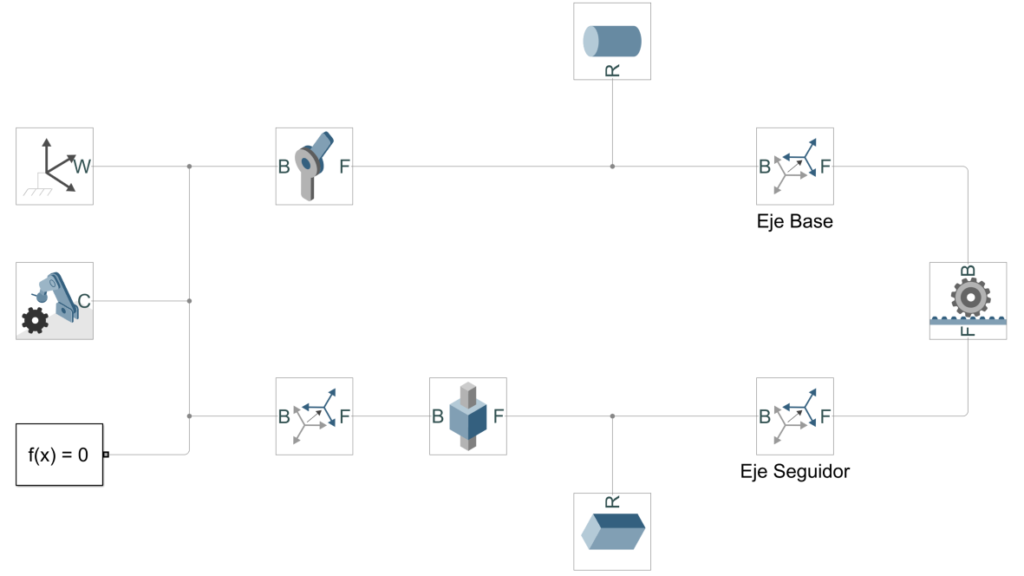
La conexión total del modelo debe ser completad de la siguiente forma:
Modelo completo del mecanismo piñón-cremallera
Finalmente, con esto el modelo está listo para continuar desarrollo. Se pueden agregar entradas ya sean de movimiento o de Torque en la junta «Revolute» y obtener la respuesta del sistema en la junta «Prismatic».
En el año 2014, Marcelo Moya obtuvo su título de Ingeniero en Mecatrónica en la Universidad UTE.
Debido a su alto rendimiento, inició su carrera laboral inclusive antes de culminar sus estudios universitarios.
Se desempeñó como Analista Técnico en el ex Instituto Nacional de Eficiencia Energética y Energías Renovables (INER) desde el año 2013 al 2018. Debido a esto, posee una vasta experiencia en proyectos de eficiencia energética y energías renovables. También, fue docente técnico en la Universidad UTE desde el año 2015 hasta el año 2021.
En el año 2018, en el Instituto de Investigación Geológico y Energético se desempeñó como Analista Técnico de Servicios Especializados y es a partir del año 2019 que obtiene el cargo de Director de Transferencia Tecnológica e Incubación.
Cuenta una maestría en Ecoeficiencia Industrial Mención en Eficiencia Energética graduado en la Universidad Internacional SEK en el año 2019.
Además, está acreditado como Investigador Agregado 2 por parte de la SENESCYT.
Dentro de su producción científica posee más de 20 artículos publicados en revistas tanto regionales como de alto impacto en áreas de Energías, Eficiencia Energética y Mecatrónica.
Cabe destacar que, cuenta con 5 patentes de modelos de utilidad presentadas ante el SENADI y varias ponencias en congresos científicos tanto nacionales como internacionales.
Adicional, Marcelo es un apasionado de los autos hasta el punto que el mismo repara su auto clásico.
Es un fanático de los juegos de video, específicamente de los juegos desarrollados por Nintendo.
En la parte deportiva, Marcelo se mantiene en forma practicando deportes como ciclismo, y el futbol.
Felicitamos a Marcelo por todo su destacada trayectoria y por ocupar un cargo de directivo.
Durante la semana del 22 al 26 de marzo del 2021 se llevó acabo la segunda edición del evento internacional “Global Faculty Week 2021” realizado por Kaunas University of Techonology (KTU). Este evento es avalado por Erasmus+ como movilidad docente.
Global Faculty Week 2021
Durante la semana, más de 50 profesores de 23 países impartieron clases en línea en las facultades de KTU. La lista de participantes incluyó profesores de Europa, también de otros países como Brasil, Colombia, Ecuador, Malasia, Omán, entre otros.
La Facultad de Ingeniería Eléctrica y Electrónica de KTU realizó la invitación para participar en las siguientes temáticas: Automatización, Robótica, Inteligencia Artificial con enfoque en programación PLC, control de robots, sistemas mecatrónicos, sistemas discretos y no lineales, sistemas SCADA, modelado de sistemas robotizados, control de unidades eléctricas y comunicaciones industriales. Representando a Ecuador participaron cinco docentes de la carrera de Ingeniería Mecatrónica de la Facultad de Ciencias de la Ingeniería e Industrias de la Universidad UTE.
Los docentes impartieron 8 horas de clases con los siguientes temas:
Las clases se impartieron en el idioma inglés con la más alta calidad, respondiendo al nivel del evento, el cual corresponde a los estándares de la carrera de Ingeniería Mecatrónica de la Universidad UTE.