Esta ocasión, les mostraremos como representar de forma conceptual un mecanismo piñón-cremallera en simulink utilizando los elementos de la biblioteca simscape multibody.
Para iniciar, se debe crear un archivo nuevo de simulink y agregar los elementos básicos necesarios para modelos utilizando la biblioteca de simscape multibody. Todos los elementos que se utilizarán se encuentran en Simscape -> Multibody.
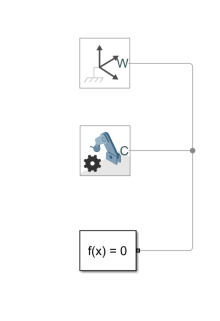
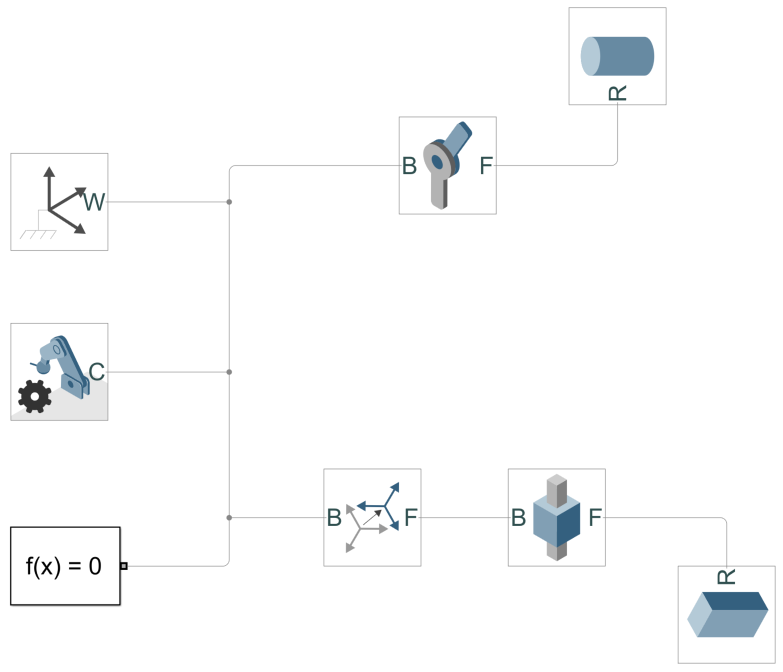
Dentro de Utilities, agregar Mechanism Configuration. De «Frames and Transforms» agregar «World Frame». Ademas, agregar de Simscape->Utilities el elemento «Solver Configuration» y conectar los elementos como se muestra en la figura.
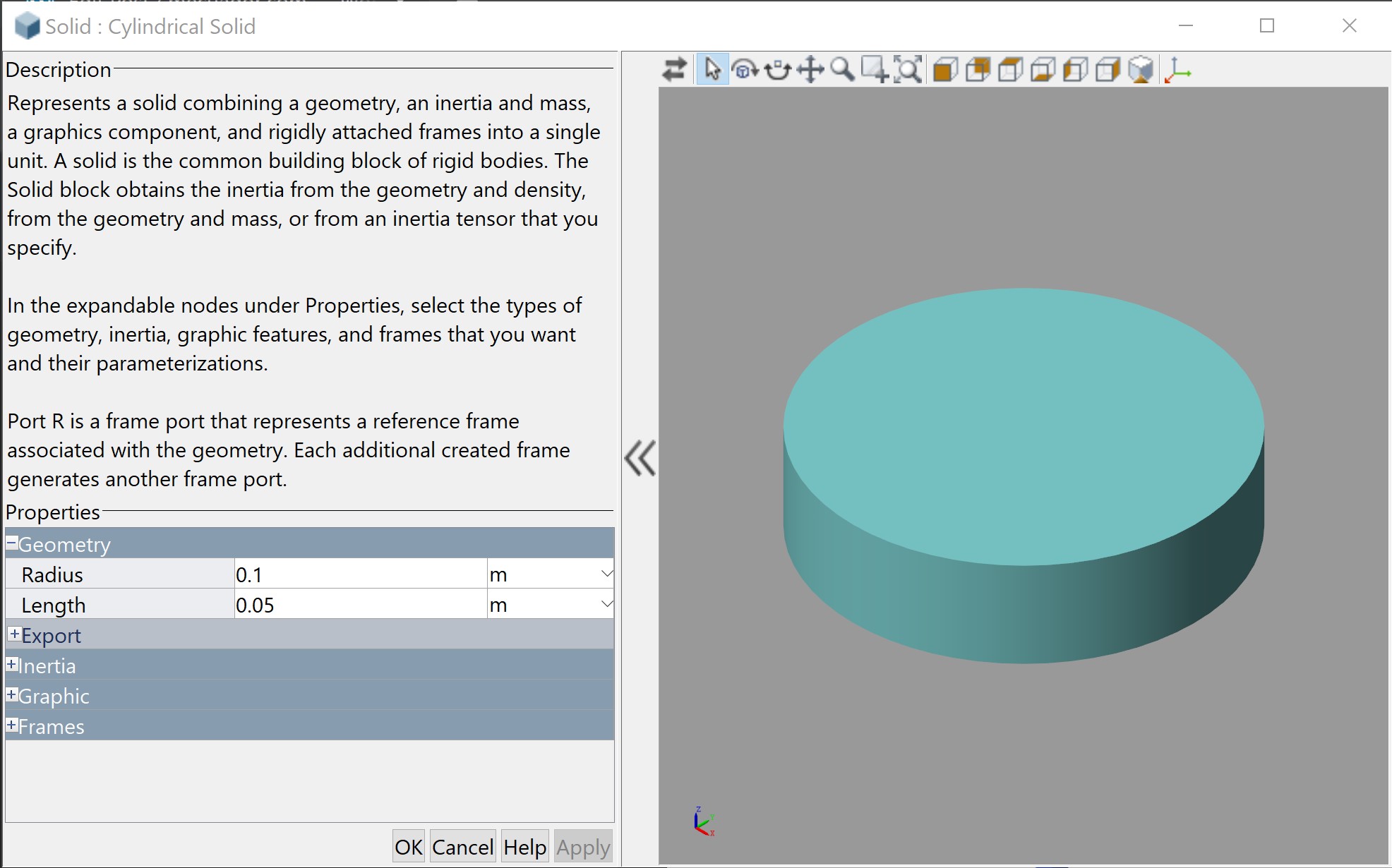
Luego, desde «Body elements» se deben agregar los elementos «Brick Solid» y «Cylindrical Solid».
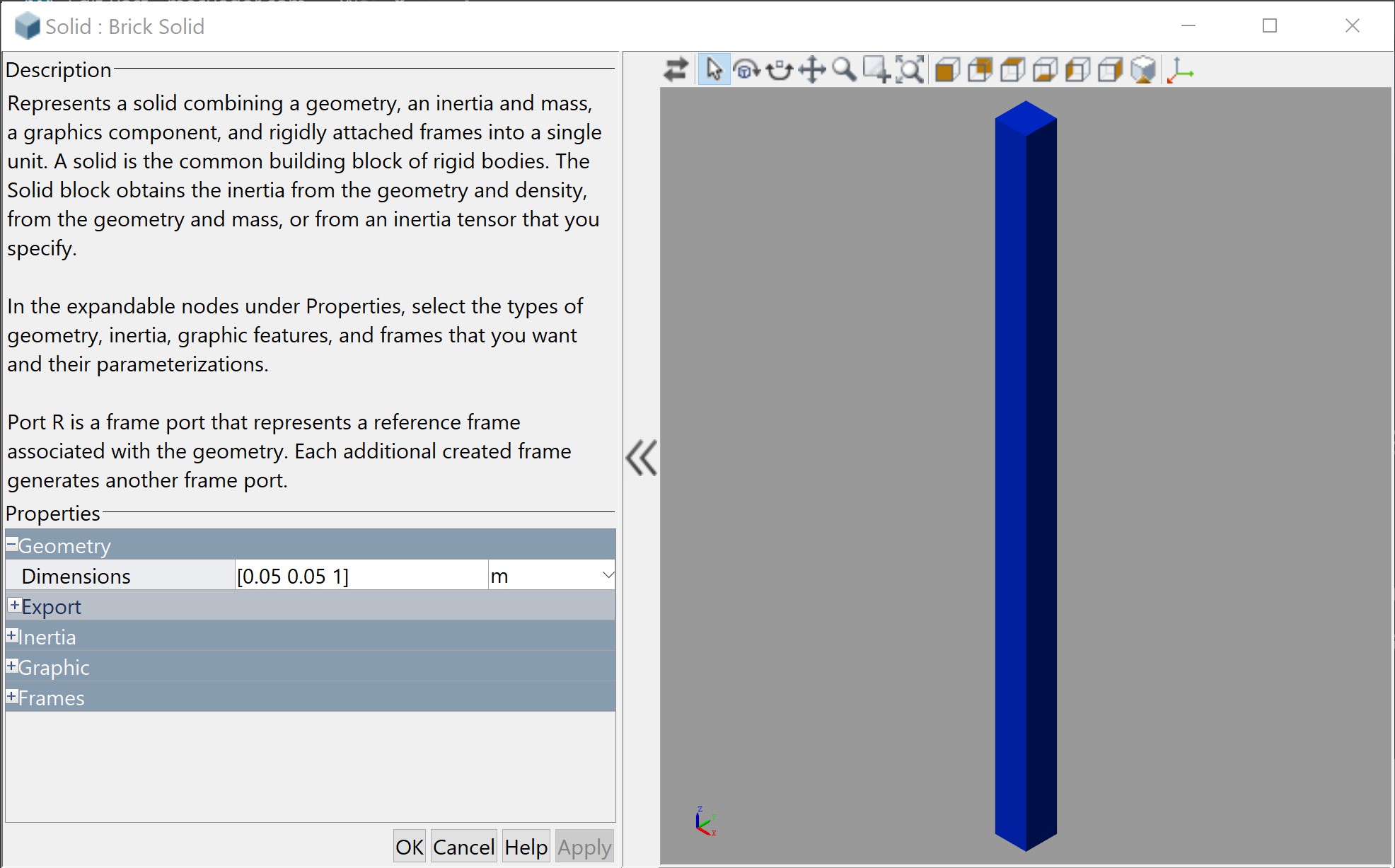
Seguidamente, configure los elementos como se muestra a continuación. (Utilice el deslizador de las fotografías para poder ver la configuración de cada elemento)
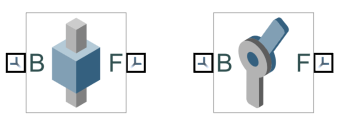
Además, desde «Joints«, agregue las juntas «Prismatic» y «Revolute» al modelo.
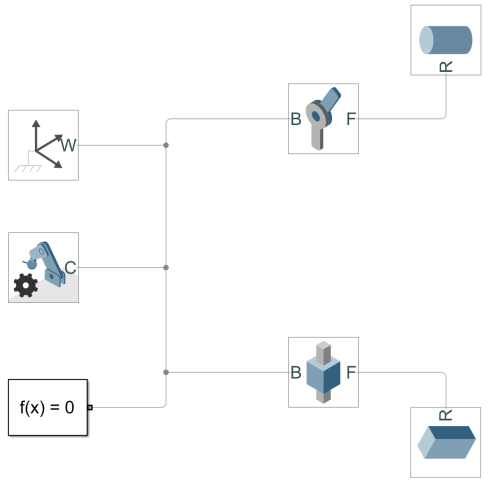
Utilice las juntas para relacionar los solidos que fueron configurados de acuerdo con la siguiente figura y asegúrese que los puertos B estén conectados con el «Reference World».
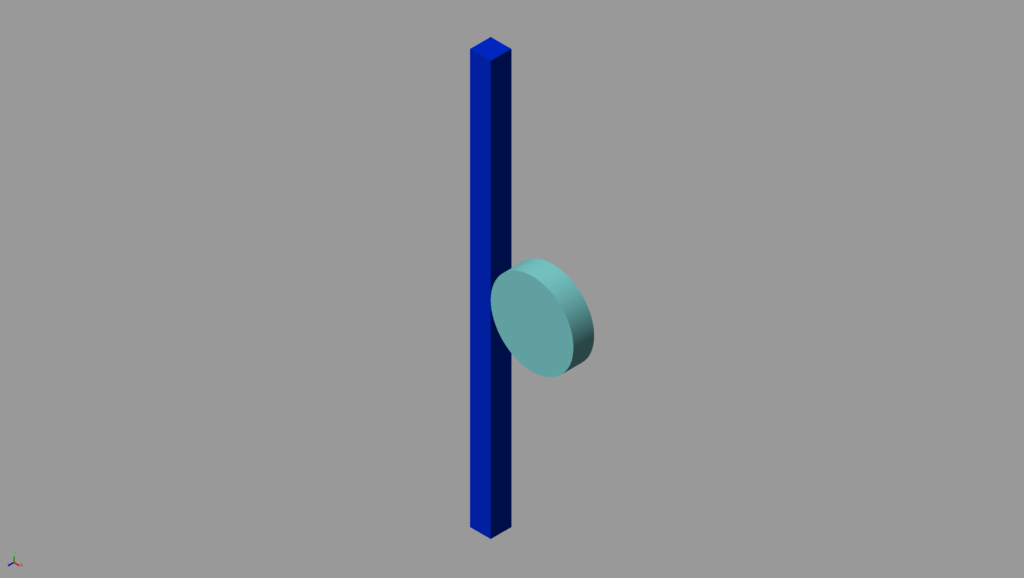
Como resultado, al ejecutar la simulación, el sistema debe mostrarse de la siguiente forma en el Mechanics Explorers:
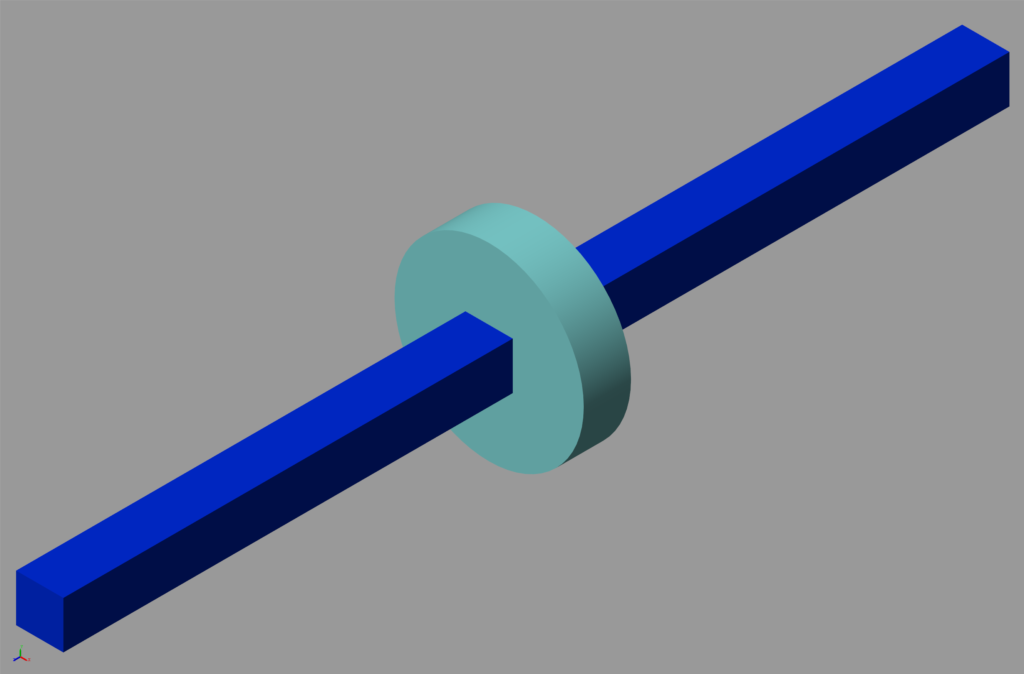
Es importante que la convención de visualización es que el eje Y corresponde al eje vertical. Se puede observar que no está posicionado para poder establecer una relación de piñón-cremallera entre los dos elementos. Para posicionar de forma adecuada el elemento que representa a la cremallera se debe utilizar un elemento «Rigid Transform», el cual se encuentra Frames and Transforms.
Este elemento debe ser configurado de la siguiente forma:
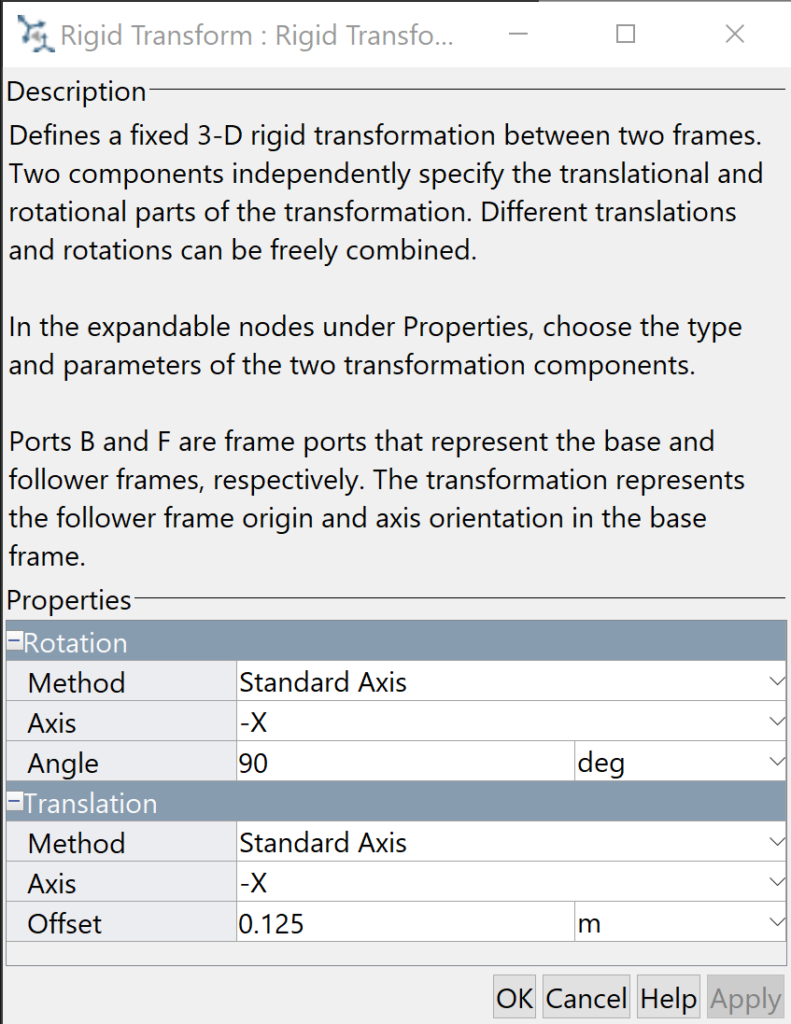
Consecuentemente, conéctelo entre el «World Frame» y «Prismatic Joint». El elemento «Rigid Transform» permite crear puntos de conexión con base en los ejes de referencia presentes en el modelo.
Al momento de ejecutar el modelo debe visualizarse de la siguiente forma en el Mechanics Explorer.
Conexión piñón-cremallera
Una vez realizado esto se puede agregar la restricción de piñón-cremallera para lo cual es necesario crear puntos de conexión utilizando el elemento «Rigid Transform» debido a que los ejes de referencia no permitirán que el sistema sea ensamblado correctamente.
Según la descripción del elemento «Rack and Pinion Constraint» se debe cumplir con lo siguiente: El piñón debe girar alrededor del eje z base y la cremallera se desplaza a lo largo del eje z seguidor. En la configuración inicial, el eje z del seguidor es paralelo al eje x de la base. El eje del seguidor descansa en el eje negativo de las y de la base. Tanto el eje y de la base como del seguidor son paralelos. Durante la simulación, el piñón y la cremallera deben ser alineados por el resto del mecanismo. Dentro de este bloque solo se debe configurar el radio del piñón, el cual para este caso es de 0.1 m.
En la siguiente figura se representa como deben estar colocados los ejes de referencia que servirán para realizar la conexión del «Rack and Pinion Constraint».

Donde los ejes pueden ser identificados de acuerdo con los colores:
- Rojo -> Eje X
- Verde -> Eje Y
- Azul -> Eje Z
El eje del seguidor debe estar ubicado a una distancia igual al radio del piñón medida desde el eje de referencia base.
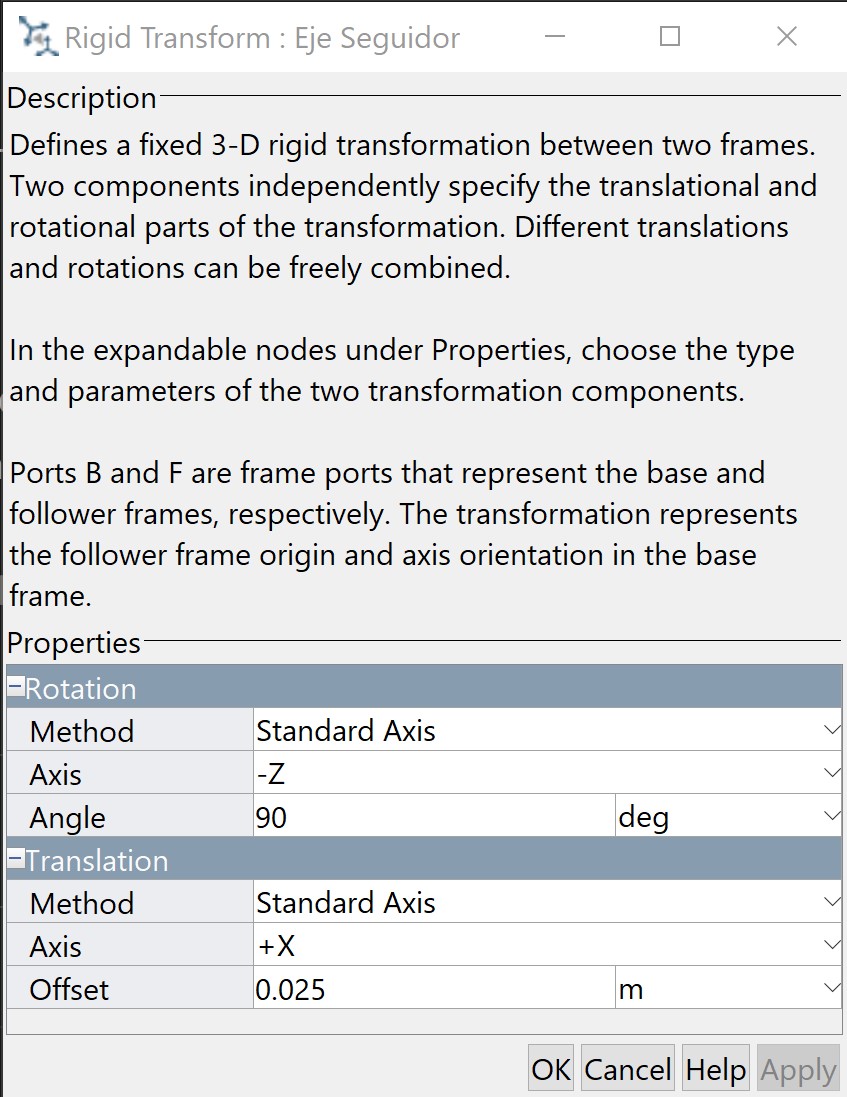
A continuación, se muestra como deben ser configurados ambos bloques de «Rigid Transform» tanto para la base como para el seguidor.
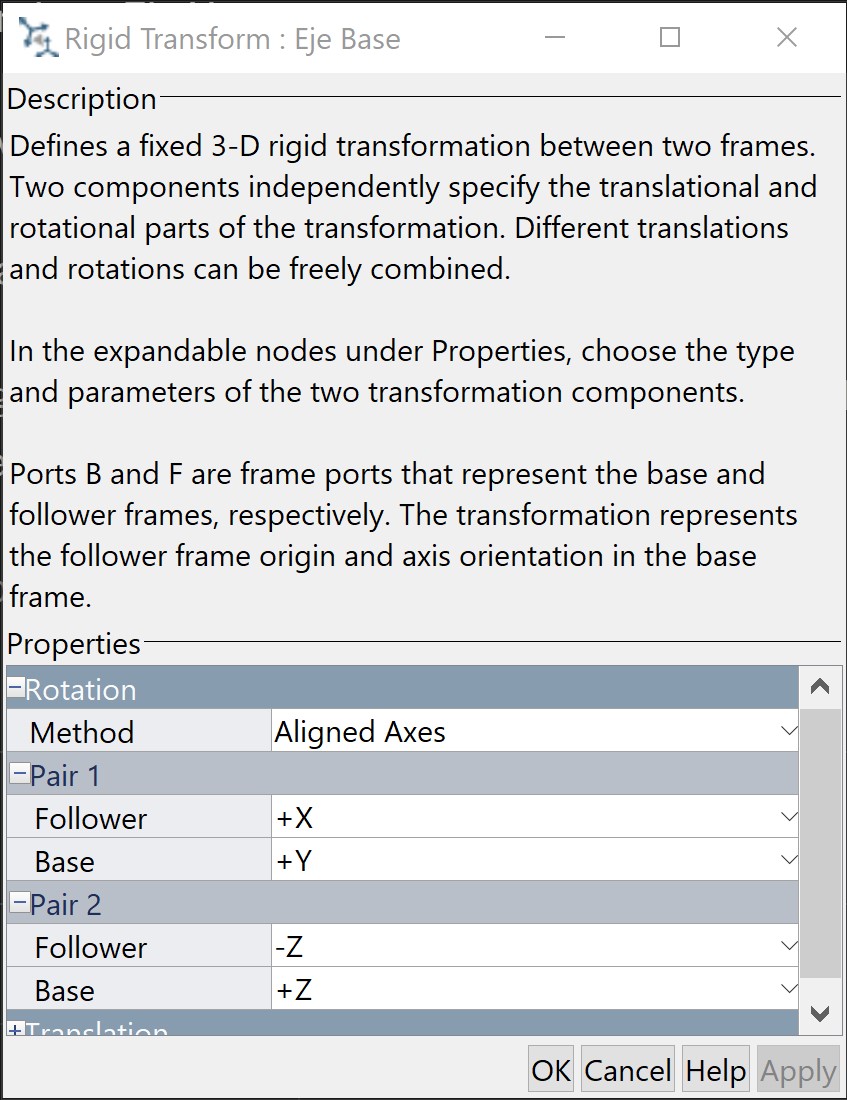
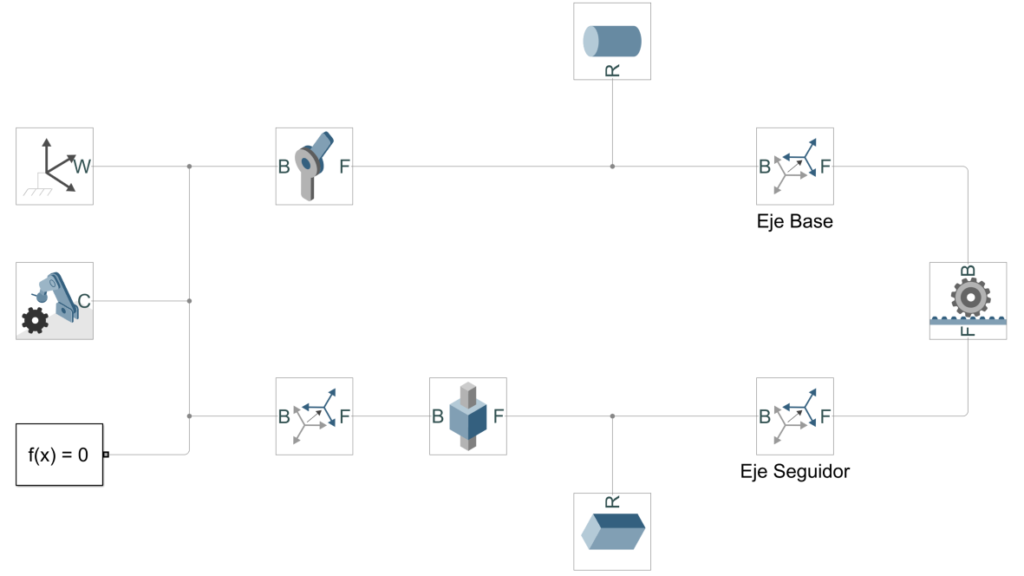
La conexión total del modelo debe ser completad de la siguiente forma:
Finalmente, con esto el modelo está listo para continuar desarrollo. Se pueden agregar entradas ya sean de movimiento o de Torque en la junta «Revolute» y obtener la respuesta del sistema en la junta «Prismatic».